Верига, която позволява на потребителя да управлява линейно скоростта на свързан двигател чрез завъртане на прикрепен потенциометър, се нарича верига на регулатора на скоростта на двигателя.
Тук са представени 3 лесни за изграждане схеми на регулатора на скоростта за двигатели с постоянен ток, едната използва MOSFET IRF540, втората използва IC 555 и третата концепция с IC 556, включваща обработка на въртящия момент.
Дизайн # 1: Мосфет базиран на DC регулатор на скоростта на двигателя
Много готина и лесна схема на регулатора на скоростта на DC мотора може да бъде изградена с помощта на само един MOSFET, резистор и гърне, както е показано по-долу:

Използване на BJT Emitter Follower

Както може да се види, mosfet е монтиран като последовател на източника или общ режим на източване, за да научите повече за тази конфигурация, може да вижте тази публикация , който обсъжда версия на BJT, въпреки това принципът на работа остава същият.
В горната конструкция на контролера на постояннотоков двигател, регулирането на гърнето създава различна потенциална разлика през портата на MOSFET, а изходният щифт на MOSFET просто следва стойността на тази потенциална разлика и съответно регулира напрежението на двигателя.
Това предполага, че източникът винаги ще бъде 4 или 5V, изоставайки от напрежението на портата и ще варира нагоре / надолу с тази разлика, представяйки променливо напрежение между 2V и 7V в двигателя.
Когато напрежението на затвора е около 7V, щифтът на източника ще подаде минимум 2V към двигателя, причинявайки много бавно завъртане на двигателя, и 7V ще бъде на разположение през щифта на източника, когато настройката на гърнето генерира пълните 12V през портата на MOSFET.
Тук можем ясно да видим, че изходният код на MOSFET изглежда 'следва' портата и следователно последователят на източника на името.
Това се случва, защото разликата между портата и изходния щифт на MOSFET трябва винаги да бъде около 5V, за да се даде възможност на MOSFET да работи оптимално.
Както и да е, горната конфигурация помага да се осигури плавен контрол на скоростта на двигателя и дизайнът може да бъде изграден доста евтино.
На мястото на MOSFET може да се използва и BJT и всъщност BJT би произвел по-висок обхват на управление от около 1V до 12V през двигателя.
Демо видео
https://youtu.be/W762NTuQ19gКогато става въпрос за равномерно и ефективно управление на скоростта на двигателя, PWM базиран контролер се превръща в идеалния вариант, тук ще научим повече, относно проста схема за изпълнение на тази операция.
Дизайн # 2: PWM DC управление на двигателя с IC 555
Дизайнът на обикновен регулатор на скоростта на двигателя, използващ ШИМ, може да се разбира по следния начин:
Първоначално, когато веригата се захранва, щифтът на спусъка е в логически ниско положение, тъй като кондензаторът C1 не е зареден.
Горните условия инициират цикъла на трептене, като изходът се променя до логически висок.
Сега високата мощност принуждава кондензатора да се зарежда чрез D2.
При достигане на ниво на напрежение, което е 2/3 от захранването, щифт # 6, който е прагът на IC задействанията.
Моментът ПИН # 6 задейства, ПИН # 3 и ПИН # 7 се връща към ниска логика.
С щифт # 3 на ниско ниво, C1 отново започва да се разрежда през D1 и когато напрежението на C1 падне под нивото, което е 1/3 от захранващото напрежение, щифт # 3 и щифт # 7 отново стават високи, което кара цикъла да следва и продължете да повтаряте.
Интересно е да се отбележи, че C1 има две дискретно зададени пътеки за процеса на зареждане и разреждане чрез диодите D1, D2 и през съпротивителните рамена, зададени съответно от гърнето.
Това означава, че сумата от съпротивленията, срещани от C1 по време на зареждане и разреждане, остава същата, независимо от начина, по който е зададен пота, следователно дължината на вълната на излезлия импулс винаги остава същата.
Въпреки това, тъй като периодите на зареждане или разреждане зависят от стойността на съпротивлението, срещана по техните пътища, потът дискретно задава тези периоди от време според своите корекции.
Тъй като периодите на зареждане и разреждане са пряко свързани с изходния работен цикъл, той варира в зависимост от настройката на гърнето, придавайки форма на предвидените вариращи PWM импулси на изхода.
Средният резултат от съотношението марка / интервал води до изхода на ШИМ, който от своя страна контролира постоянната скорост на двигателя.
ШИМ импулсите се подават към портата на MOSFET, който реагира и контролира свързания ток на двигателя в отговор на настройката на гърнето.
Текущото ниво през двигателя решава скоростта му и по този начин осъществява контролния ефект чрез гърнето.
Честотата на изхода от IC може да се изчисли по формулата:
F = 1,44 (VR1 * C1)
MOSFET може да бъде избран според изискването или тока на натоварване.
Схемата на предлагания регулатор на скоростта на двигателя с постоянен ток може да се види по-долу:

Прототип:

Доказателство за видео тестване:
https://youtu.be/M-F7MWcSiFYВ горния видеоклип можем да видим как дизайнът, базиран на IC 555, се използва за управление на скоростта на постояннотоков двигател. Както можете да станете свидетели, въпреки че крушката работи перфектно в отговор на ШИМ и варира интензивността си от минимално сияние до максимално ниско, двигателят не го прави.
Двигателят първоначално не реагира на тесните ШИМ, а по-скоро започва с рязко движение, след като ШИМ са настроени на значително по-висока широчина на импулса.
Това не означава, че веригата има проблеми, защото арматурата на постояннотоковия двигател се задържа плътно между двойка магнити. За да започне старт, котвата трябва да прескочи въртенето си през двата полюса на магнита, което не може да се случи с бавно и леко движение. То трябва да започне с тласък.
Точно затова двигателят първоначално се нуждае от по-високи настройки за ШИМ и след стартиране на въртенето котвата получава известна кинетична енергия и сега постигането на по-ниска скорост става възможно чрез по-тесни ШИМ.
Все пак получаването на въртене до едва движещо се бавно състояние може да бъде невъзможно поради същата причина, както е обяснено по-горе.
Постарах се по най-добрия начин да подобря реакцията и да постигна възможно най-бавния ШИМ контрол, като направих няколко модификации в първата диаграма, както е показано по-долу:

Като каза това, двигателят може да покаже по-добър контрол при по-бавни нива, ако двигателят е прикрепен или закопчан с товар през зъбни колела или система от ролки.
Това може да се случи, защото натоварването ще действа като амортисьор и ще помогне да се осигури контролирано движение по време на по-ниските настройки на скоростта.
Дизайн # 3: Използване на IC 556 за подобрен контрол на скоростта
Вариране на скоростта на постояннотоков двигател може да изглежда не толкова трудно и може да намерите много вериги за него.
Тези вериги обаче не гарантират постоянни нива на въртящ момент при по-ниски скорости на двигателя, което прави функционирането доста неефективно.
Освен това при много ниски скорости поради недостатъчен въртящ момент двигателят има тенденция да спира.
Друг сериозен недостатък е, че в тези вериги няма включена функция за обръщане на двигателя.
Предложената схема е напълно свободна от горните недостатъци и е в състояние да генерира и поддържа високи нива на въртящ момент дори при най-ниските възможни скорости.
Операция на веригата
Преди да обсъдим предложената схема на PWM моторния контролер, бихме искали да научим и по-простата алтернатива, която не е толкова ефективна. Независимо от това, може да се счита за разумно добро, докато натоварването над двигателя не е високо и докато скоростта не е намалена до минимални нива.
Фигурата показва как може да се използва единична 556 IC за управление на скоростта на свързан двигател, няма да навлизаме в подробности, единственият забележим недостатък на тази конфигурация е, че въртящият момент е право пропорционален на скоростта на двигателя.
Връщайки се към предложената конструкция на веригата на регулатора на скоростта с висок въртящ момент, тук използвахме две 555 интегрални схеми вместо една или по-скоро една интегрална схема 556, която съдържа две 555 интегрални схеми в един пакет.
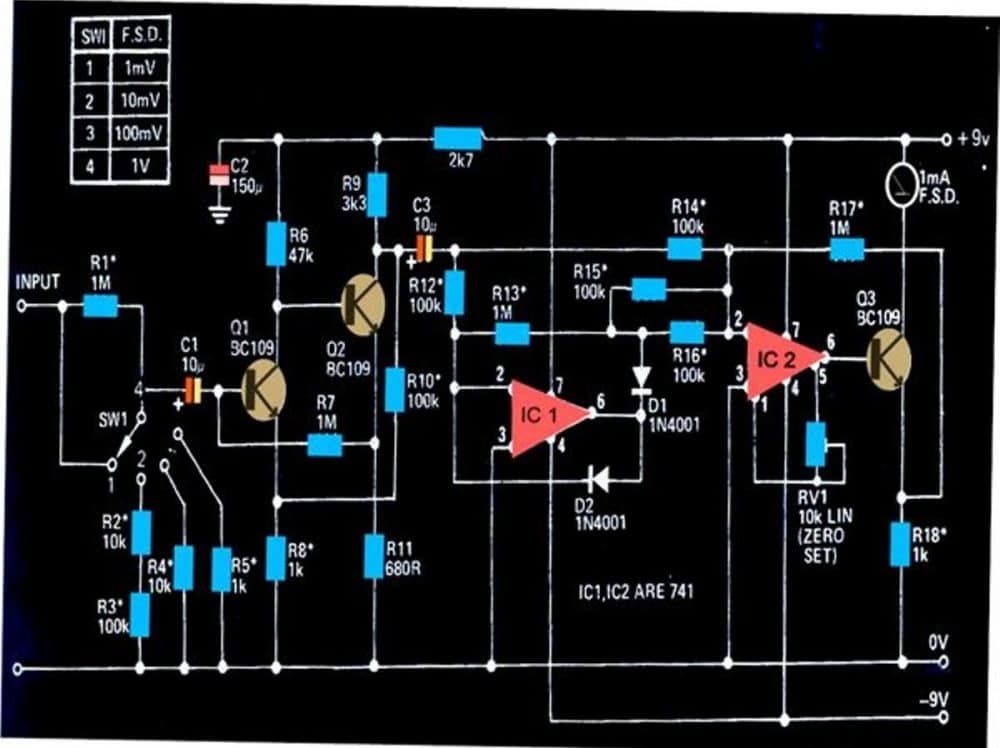
Електрическа схема

Основните функции
Накратко предложеното Контролер за постоянен ток включва следните интересни функции:
Скоростта може да варира непрекъснато от нула до максимум, без да се спира.
Въртящият момент никога не се влияе от нивата на скоростта и остава постоянен дори при минимални нива на скорост.
Въртенето на двигателя може да бъде обърнато или обърнато за част от секундата.
Скоростта е променлива в двете посоки на въртене на двигателя.
Двете 555 интегрални схеми се възлагат с две отделни функции. Една секция е конфигурирана като нестабилен мултивибратор, генериращ часовници с квадратна вълна от 100 Hz, който се подава към предходната секция 555 вътре в опаковката.
Горната честота е отговорна за определяне на честотата на ШИМ.
Транзисторът BC 557 се използва като източник на постоянен ток, който поддържа прилежащия кондензатор в рамото на колектора заредено.
Това развива напрежение на зъбния трион в горния кондензатор, което се сравнява вътре в 556 IC с напрежението на пробата, приложено външно над показания извод.
Примерното напрежение, приложено външно, може да бъде получено от обикновена верига за захранване с променливо напрежение 0-12V.
Това променливо напрежение, приложено към 556 IC, се използва за промяна на ШИМ на импулсите на изхода и което в крайна сметка се използва за регулиране на скоростта на свързания двигател.
Превключвателят S1 се използва за незабавно обръщане на посоката на двигателя, когато е необходимо.
Списък с части
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 ома,
- R7, R8, R9, R10 = 470 ома,
- C1 = 0.1uF,
- C2, C3 = 0.01uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = превключвател SPDT
Горната схема е вдъхновена от следната схема на двигател, която е публикувана отдавна в списание elecktor electronic India.
Управление на въртящия момент на двигателя с помощта на IC 555

Първата диаграма за управление на двигателя може да бъде значително опростена чрез използване на DPDT превключвател за операцията по обръщане на двигателя и чрез използване на транзистор на последовател на емитер за изпълнение на управлението на скоростта, както е показано по-долу:

Прецизно управление на двигателя с помощта на единичен усилвател
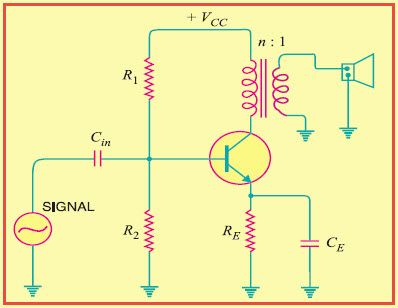
Изключително изискан или сложен контрол на постоянен ток мотор може да бъде постигнат, като се използват операционен усилвател и тахо-генератор. Операционният усилвател е монтиран като превключвател, чувствителен на напрежение. В схемата, показана по-долу, веднага щом изходът на тахо-генератора е по-нисък от предварително зададеното референтно напрежение, превключващият транзистор се включва и 100% мощност ще бъде осигурена на двигателя.
Действието на превключване на операционния усилвател ще се случи само с няколко миливолта около референтното напрежение. Ще ви трябва двойно захранване, което може да е само стабилизирано от ценер.

Този контролер на двигателя позволява безстепенно регулируем обхват, без да включва каквато и да е форма на механични проблеми.
Изходът на операционния усилвател е само +/- 10% от нивото на захранващите релси, като по този начин се използва двупосочен излъчвател с огромни скорости на двигателя.
Референтното напрежение може да бъде фиксирано чрез термистори или LDR и т.н. Експерименталната настройка, посочена в схемата на схемата, използва операционен усилвател RCA 3047A и 0,25 W 6V двигател като тахо-генератор, който генерира около 4V при 13000 об / мин за предвидената обратна връзка.
Предишна: 3 най-добри вериги за крадец на джаул Напред: Схема за свирка на тенджера под налягане