
Определение
Безчетков постояннотоков двигател се състои от ротор под формата на постоянен магнит и статор под формата на многофазни намотки на котвата. Той се различава от конвенционалния постояннотоков двигател по това, че не съдържа четки и комутацията се извършва с помощта на електричество, като се използва електронно задвижване за захранване на намотките на статора.
По принцип BLDC двигател може да бъде конструиран по два начина - чрез поставяне на ротора извън сърцевината и намотките в сърцевината и друг чрез поставяне на намотките извън сърцевината. В предишното устройство роторните магнити действат като изолатор и намаляват скоростта на разсейване на топлината от двигателя и работят при слаб ток. Обикновено се използва във фенове. При последното разположение двигателят разсейва повече топлина, като по този начин увеличава въртящия си момент. Използва се в твърди дискове.

BLDC
4-полюсна 2-фазна работа на двигателя
Безчетковият DC двигател се задвижва от електронно задвижване, което превключва захранващото напрежение между намотките на статора, докато роторът се върти. Положението на ротора се контролира от преобразувателя (оптичен или магнитен), който подава информация към електронния контролер и въз основа на това положение се определя намотката на статора, която трябва да се захрани. Това електронно задвижване се състои от транзистори (2 за всяка фаза), които се управляват чрез микропроцесор.

BLDC-DC
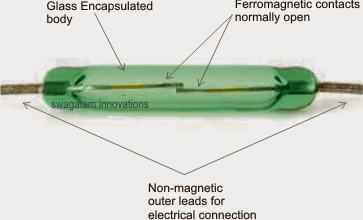
Магнитното поле, генерирано от постоянните магнити, взаимодейства с полето, индуцирано от тока в намотките на статора, създавайки механичен въртящ момент. Електронната комутационна верига или задвижването превключва захранващия ток към статора, така че да поддържа постоянен ъгъл от 0 до 90 градуса между взаимодействащите полета. Датчиците на Хол са монтирани предимно на статора или на ротора. Когато роторът премине през сензора на Хола, базиран на Северния или Южния полюс, той генерира висок или нисък сигнал. Въз основа на комбинацията от тези сигнали се определя намотката, която се захранва. За да поддържа двигателя работещ, магнитното поле, произведено от намотките, трябва да се измести в положение, тъй като роторът се движи, за да настигне полето на статора.

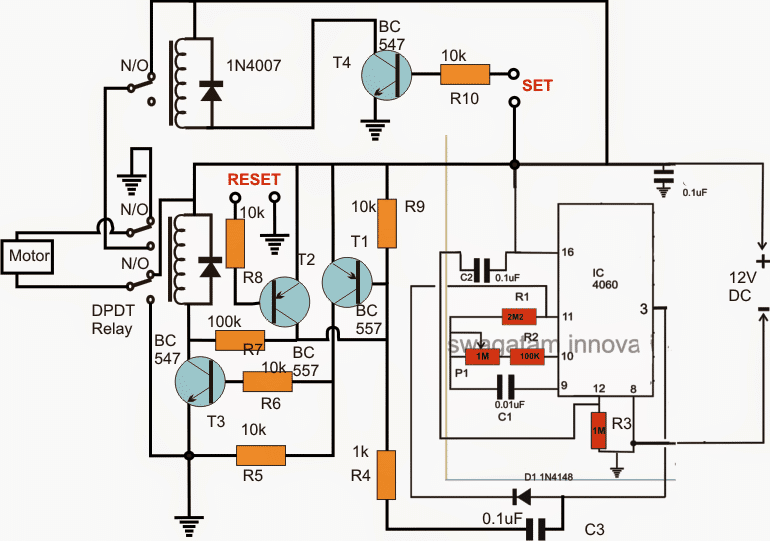
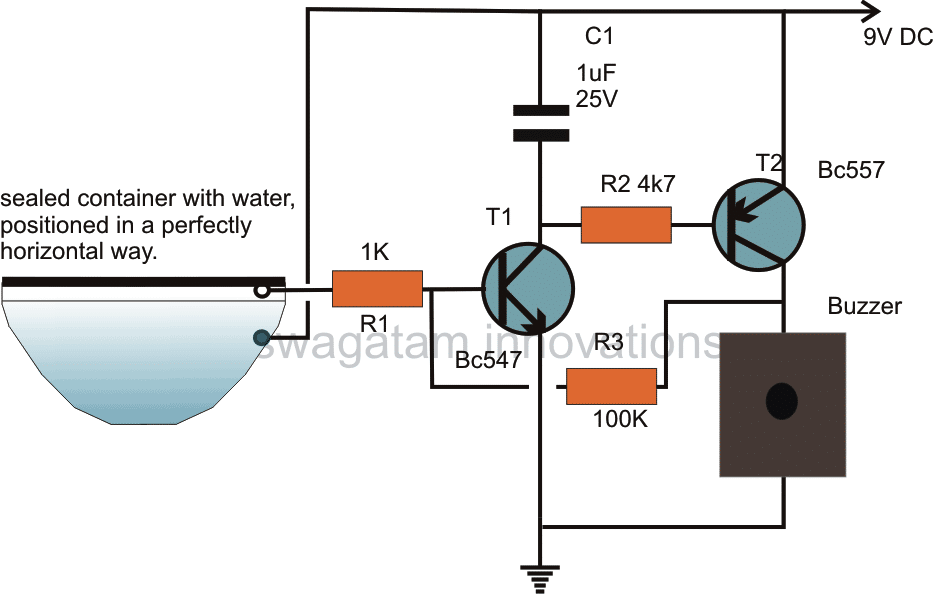
Верига
В 4-полюсен, двуфазен безчетков постояннотоков двигател се използва единичен сензор на Hall, който е вграден в статора. Докато роторът се върти, сензорът на Hall усеща позицията и развива висок или нисък сигнал, в зависимост от полюса на магнита (север или юг). Сензорът на Hall е свързан чрез резистор към транзисторите. Когато на изхода на сензора се появи сигнал с високо напрежение, транзисторът, свързан към бобина А, започва да провежда, осигурявайки пътя за протичане на тока и по този начин захранващ бобина А. Кондензаторът започва да се зарежда до пълното захранващо напрежение. Когато сензорът на Хол открие промяна в полярността на ротора, той развива сигнал с ниско напрежение на изхода си и тъй като транзисторът 1 не получава захранване, той е в изключено състояние. Напрежението, развито около кондензатора, е Vcc, което е захранващото напрежение към 2ndтранзистор и бобината В вече е под напрежение, тъй като токът преминава през нея.
BLDC двигателите имат фиксирани постоянни магнити, които се въртят и фиксирана котва, премахвайки проблемите с свързването на ток към движещата се котва. И евентуално повече полюси на ротора от статорните или нежеланите двигатели. Последните могат да бъдат без постоянни магнити, просто полюси, които се индуцират върху ротора, след което се изтеглят в подреждане чрез намотки на статора по време. Електронен контролер замества сглобката четка / комутатор на четкия мотор с постоянен ток, който непрекъснато превключва фазата към намотките, за да поддържа двигателя да се върти. Контролерът извършва сравнително разпределено захранване по време, използвайки полупроводникова верига вместо четка / комутаторна система.

BLDC мотор
7 Предимства на безчеткови постояннотокови двигатели
- По-добра скорост спрямо характеристиките на въртящия момент
- Висока динамична реакция
- Висока ефективност
- Дълъг експлоатационен живот поради липса на електрически загуби и загуби от триене
- Безшумна работа
- По-високи диапазони на скоростта
Приложения:
Цената на безчетковия двигател с постоянен ток е намаляла от представянето му поради прогресирането в материалите и дизайна. Това намаление на разходите, заедно с многобройните фокусни точки, които той има върху Brush DC Motor, прави Brushless DC Motor популярен компонент в много отличителни приложения. Приложенията, които използват BLDC Motor включват, но не се ограничават до:
- Потребителска електроника
- Транспорт
- Отопление и вентилация
- Индустриално инженерство
- Модел инженеринг
Принцип на работа
Принципите за работа на BLDC двигатели са същите като при двигател с постоянен ток с четка, т.е. обратната връзка на вътрешния вал. В случай на четки постояннотоков двигател, обратната връзка се осъществява с помощта на механичен комутатор и четки. В рамките на BLDC мотора това се постига с помощта на множество сензори за обратна връзка. В BLDC двигателите ние използваме най-вече сензор с ефект на Хол, когато магнитните полюси на ротора преминават близо до сензора на Hall, те генерират сигнал ВИСОКО или НИСКО ниво, който може да се използва за определяне на позицията на вала. Ако посоката на магнитното поле е обърната, развитото напрежение също ще се обърне.
Управление на BLDC мотор
Контролният блок е реализиран от микроелектроника има няколко високотехнологични възможности за избор. Това може да се осъществи с помощта на микроконтролер, специален микроконтролер, твърдо свързан микроелектронен блок, PLC или подобен друг модул.
Аналоговият контролер все още използва, но не може да обработва съобщения за обратна връзка и да контролира съответно. С този тип управляващи схеми е възможно да се реализират високоефективни алгоритми за управление, като векторно управление, ориентирано към полето управление, високоскоростно управление, всички от които са свързани с електромагнитното състояние на двигателя. Освен това управлението на външния контур за различни изисквания за динамика като плъзгащи се моторни управления, адаптивно управление, предсказуемо управление ... и т.н. също се прилагат конвенционално.
Освен всичко това, ние откриваме PIC (интегрална схема с мощност), ASIC (специфични за приложението интегрални схеми) ... и т.н. което може значително да опрости конструкцията на управлението и силовия електронен блок. Например, днес имаме пълен PWM (Pulse Width Modulation) регулатор в една интегрална схема, която може да замени целия блок за управление в някои системи. Комбинираният драйвер IC може да осигури цялостното решение за управление на всичките шест превключвателя на захранването в трифазен преобразувател. Има многобройни подобни интегрални схеми с все повече добавяне от ден на ден. В края на деня, сглобяването на системата вероятно ще включва само част от софтуера за управление с целия хардуер, идващ в правилната форма и форма.
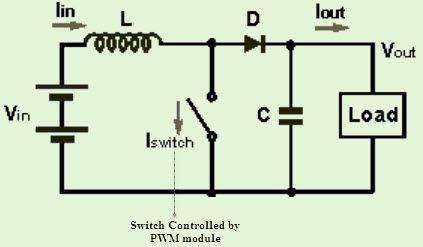
PWM (Pulse Width Modulation) вълна може да се използва за управление на скоростта на двигателя. Тук е дадено средното напрежение или средният ток, протичащ през двигателя, ще се промени в зависимост от времето за включване и изключване на импулсите, контролиращи скоростта на двигателя, т.е.Дълговият цикъл на вълната контролира скоростта му. При промяна на работния цикъл (време за включване) можем да променим скоростта. Чрез смяна на изходните портове той ефективно ще промени посоката на двигателя.
Контрол на скоростта
Контролът на скоростта на BLDC мотора е от съществено значение за мотора, който работи с желаната скорост. Скоростта на безчетков постояннотоков двигател може да се контролира чрез управление на входното напрежение на постоянен ток. Колкото по-високо е напрежението, толкова по-голяма е скоростта. Когато двигателят работи в нормален режим или работи под номинална скорост, входното напрежение на котвата се променя чрез модела PWM. Когато двигателят работи над номиналната скорост, потокът се отслабва чрез увеличаване на изходния ток.
Контролът на скоростта може да бъде контрол на скоростта със затворен или отворен цикъл.
Контрол на скоростта на отворена верига - Той включва просто контролиране на постояннотоковото напрежение, приложено към клемите на двигателя, чрез нарязване на постояннотоковото напрежение. Това обаче води до някаква форма на ограничаване на тока.
Контрол на скоростта на затворен цикъл - Включва контрол на входното захранващо напрежение чрез обратната връзка на скоростта от двигателя. По този начин захранващото напрежение се контролира в зависимост от сигнала за грешка.
Контролът на скоростта със затворен цикъл се състои от три основни компонента.
- ШИМ верига за генериране на необходимите PWM импулси. Това може да бъде или микроконтролер, или IC с таймер.
- Сензорно устройство за отчитане на действителната скорост на двигателя. Това може да бъде сензор за ефект на Хол, инфрачервен сензор или оптичен енкодер.
- Моторно задвижване за управление на работата на двигателя.
Тази техника на промяна на захранващото напрежение въз основа на сигнала за грешка може да бъде или чрез техниката за управление на pid, или с помощта на размита логика.
Приложение за контрол на скоростта на безчетков DC двигател

BLDC DC управление на двигателя
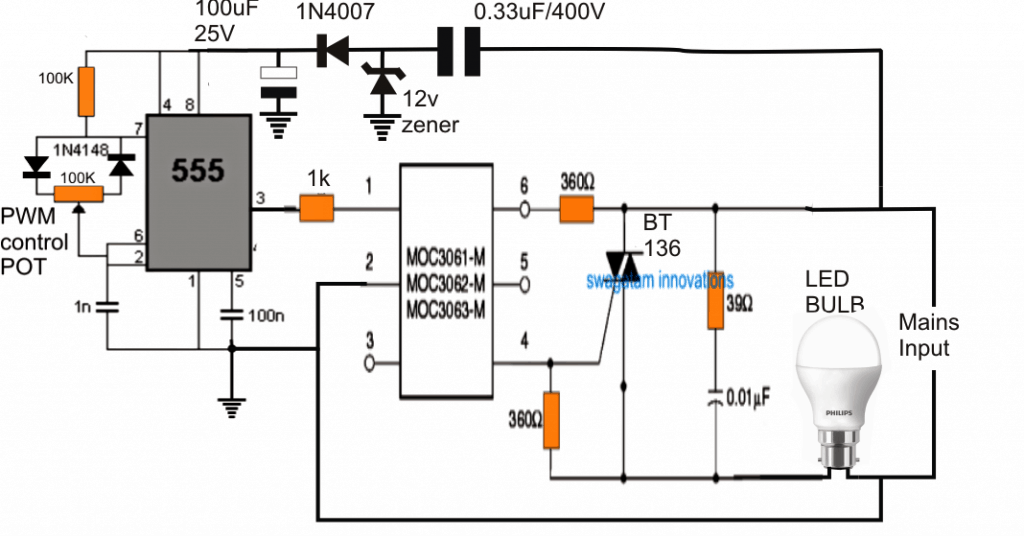
Работата на двигателя се контролира с помощта на оптрон и MOSFET устройство, където входното DC захранване се управлява чрез PWM техниката от микроконтролера. Докато двигателят се върти, инфрачервеният светодиод, присъстващ в шахтата му, се осветява с бяла светлина поради наличието на бяло петно върху неговата ос и отразява инфрачервената светлина. Фотодиодът получава тази инфрачервена светлина и претърпява промяна в нейното съпротивление, като по този начин причинява промяна в захранващото напрежение към свързания транзистор и се дава импулс на микроконтролера, за да генерира броя на въртенията в минута. Тази скорост се показва на LCD дисплея.
Необходимата скорост се въвежда в клавиатурата, свързана с микроконтролера. Разликата между усетената скорост и желаната скорост е сигналът за грешка и микроконтролерът генерира ШИМ сигнал според сигнала за грешка, въз основа на размитата логика, за да даде постояннотоковата мощност на двигателя.
По този начин, използвайки управление със затворен контур, скоростта на безчетковия двигател за постоянен ток може да се контролира и може да се накара да се върти с всяка желана скорост.
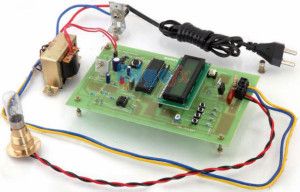
Снимка:





{kind=link}