
Обикновено роботите с дистанционно управление използват RF схеми, които имат недостатъците на ограничен работен обхват, ограничен контрол и ограничен честотен обхват. За да се преодолеят тези недостатъци, мобилен телефон, управляван от Land Rover се използва роботизирано превозно средство. Предоставя предимствата на роботизиран контрол, контролери без проникване и до дванадесет системи за управление и т.н.
Въпреки че възможностите и външния вид на вградена роботика варират значително, всички роботи споделят характеристиките на подвижна, механична конструкция под някаква форма на контрол. Контролът на роботите включва три различни фази, те са възприятие, обработка и действие. Обикновено сензорите са монтирани на робота. Възприемането и обработката се извършва от вградения микроконтролер, а действието се извършва с помощта на двигатели.
Роботизирано превозно средство Land Rover, управлявано от мобилен телефон

Мобилен телефон, управляван от Land Rover Robotic Vehicle от Edgefxkits.com
Основното намерение на този проект е да се контролира роботизирана ръка, която е монтирана на роботизирано превозно средство с помощта на мобилен телефон. Той осигурява голям работен обхват и стабилен контрол и т.н.
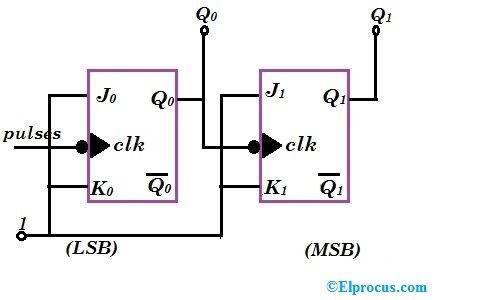
Блокова диаграма на роботизиран автомобил Land Rover, управляван от мобилен телефон:

Блок-схема на Land Rover, управляван от мобилен телефон
Основните градивни елементи са микроконтролерът, мобилният телефон, DTMF декодерът и веригата на драйвер за постоянен ток. Мобилният телефон е най-важната част от цялата система, тъй като цялата система работи и се активира от мобилния телефон. DTMF (двучестотен многочестотен) получава входния сигнал от мобилния телефон и го декодира, след което генерира 4-битов цифров изход на 8051 микроконтролер . Когато декодерът DTMF дава цифров изход, той също генерира прекъсване всеки път.
Микроконтролерът е сърцето на цялата система, тъй като изпълнява всички контролиращи действия. Микроконтролерът зависи от кода, който се генерира от DTMF декодера за придвижване на ровера надясно или наляво и напред или назад чрез завъртане на двата DC мотора. Драйверът на постояннотоковия двигател получава активиращи сигнали от микроконтролера по отношение на ниска или висока логика, след което усилва и завърта два двигателя в двете посоки.
Контролът на робота включва главно четири различни фази: възприятие, обработка на действието и откриване. В етапа на възприемане, ако мобилният телефон, прикрепен към робота, получи повикване, тогава натискането на бутона на мобилния телефон декодира генерирания DTMF тон. След това декодерният чип получава аудио сигнала от мобилния телефон и след това преобразува DTMF тона в двоичен код, който след това се подава към микроконтролера. В този проект се използва MT88710 IC като декодер DTMF. В етапа на обработка микроконтролерът обработва двоичния код, получен от DTMF декодера. The Микроконтролерът е предварително програмиран в „C“ за да изпълни тази конкретна задача според входните битове.
На етапа на действие въртенето на двигателите зависи от входа, даден от микроконтролера. Два мотора за постоянен ток, всеки от 30 оборота в минута, се използват за landrover и се задвижват от интегралната схема на драйвера на двигателя. При откриване на сцената и за откриване на препятствия се използва инфрачервен предавател и приемник се използват заедно със зумера. Когато препятствието дойде пред робота, IR предавателят предава IR лъчите върху обекта, след което обектът отразява IR лъчите към IR приемника. След това IR приемникът приема IR лъчите, за да активира зумера.
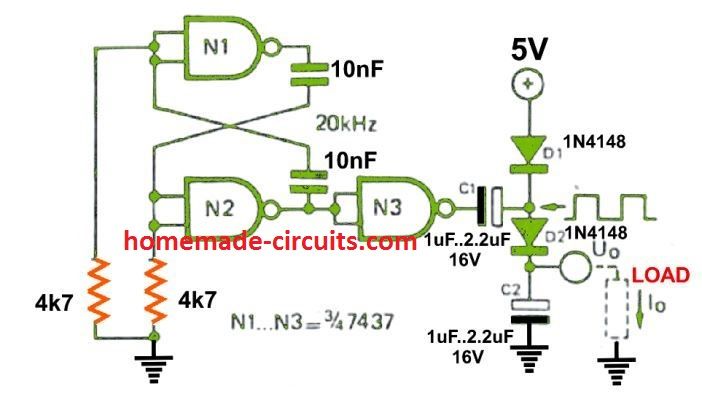
Електрическа схема на Land Rover Robotic Vehicle, управляван от мобилен телефон:
Основните компоненти на този роботизиран landrover, управляван от мобилен телефон, са микроконтролер, драйвер за двигател и DTMF декодер. В този проект се използва декодер DTMF от серия MT8870, който използва цифрови техники за броене, за да открие 16-те тона DTMF двойки в 4-битов код. Вградената схема за набиране на тонове елиминира предварително филтриране. Ако на извода2 се подаде входен сигнал, тогава конфигурацията на входа се разпознава като ефективна. Сигналът за 4-битово декодиране на DTMF тона се прехвърля към pin11 през изхода на pin 14. Тези щифтове са свързани към щифтовете на микроконтролера Pao, Pa1, Pa2 и Pa3. Изходът на микроконтролера от изводите на портове PD0 до PD3 и PD7 се подава към входовете IN1, IN4 и дава възможност на изводите EN1, EN2 на драйвера на двигателя L293D IC да задвижете двата постояннотокови мотора .

Електрическа схема на Land Rover, управляван от мобилен телефон
В тази схема се използва превключвател S1 за ръчно нулиране. Изходът на микроконтролера не е достатъчен за задвижване на двигателите с постоянен ток, така че настоящите драйвери са необходими за въртене на двигателя. Двигателят на двигателя L293D е проектиран да осигурява двупосочни задвижващи токове до 600 mA при напрежения от 4.5V до 36V, което го прави по-лесно задвижване на постояннотокови двигатели. Двигателят на двигателя L293D се състои от четири драйвера. Пиновете IN1 до IN4 & OUT1 и OUT4 са входните и изходните щифтове на драйвера 1 до драйвер 4. Драйверите 1,2,3 и 4 се активират от щифта за активиране1 (EN1) и щифта 9 (EN2). Когато входът за активиране EN1 (pin1) е висок, драйверите 1 и 2 са активирани. По същия начин входът за активиране EN2 (pin9) позволява на драйверите 3.
Предимства и недостатъци:
Предимствата на управлявания от мобилен телефон роботизиран landrover включват система за осигуряване и наблюдение на безжичен контрол, базирана на 3G технология навигация на автомобила и неограничен оперативен обхват, базиран на мрежата на мобилния телефон. Недостатъкът включва: цената на таксуването за мобилен телефон е висока мобилните батерии се разреждат : проблемът с разреждането, свързан с батериите, тъй като батериите се зареждат поради бързото разреждане, тъй като натоварването е с висока адаптивност: системата не може да се адаптира към всички мобилни телефони, но тези с прикрепени слушалки могат да се използват само.
По този начин, този проект, управляван от мобилен телефон, е много полезен във военни приложения за управление на военни превозни средства с помощта на мобилен телефон. В бъдеще можем да открием позицията на враговете, като организираме a безжична камера към роботизираното превозно средство land rover. Този проект може да бъде полезен и за академичните среди, тъй като студентите могат да научат различни терминологии и принципи, предложени в този проект. Този проект ще помогне на учениците да добавят своите иновативни мисли и идеи разработване на проекти по роботика .
Кредити за снимки:
- Land Rover, управляван от мобилен телефон от santoshbanisetty
- Електрическа схема на Land Rover, управляван от мобилен телефон от инженергараж






{kind=link}