Тази роботизирана верига на рамото, която може да бъде изпълнена като роботизиран кран, работи с 6 серво мотора и може да се управлява чрез дистанционно управление на микроконтролера , използвайки базирана на Arduino 2.4 GHz комуникационна връзка.
Основните функции
Когато изграждате нещо толкова сложно като роботизирана ръка, то трябва да изглежда модерно и да включва много усъвършенствани функции, а не просто функции като играчка.
Предложеният пълноправен дизайн е сравнително лесен за изграждане, но въпреки това му се приписват някои усъвършенствани функции за маневриране, които могат да бъдат прецизно контролирани чрез безжични или дистанционно управлявани команди. Дизайнът е дори съвместим за промишлена употреба, ако двигателите са подходящо модернизирани.
Основните характеристики на този механичен кран като роботизирано рамо са:
- Непрекъснато регулируемо „рамо“ над 180 градуса вертикална ос.
- Непрекъснато регулируем „лакът“ над 180 градуса вертикална ос.
- Непрекъснато регулируемо „притискане с пръст“ или захват над вертикална ос 90 градуса.
- Непрекъснато регулируемо „рамо“ над хоризонтална равнина от 180 градуса.
- Цялата роботизирана система или рамото на крана е подвижно и маневрено като кола с дистанционно .
Груба симулация на работа
Няколко от обяснените по-горе функции могат да бъдат разгледани и разбрани с помощта на следната GIF симулация:

Позиции на двигателния механизъм
Следващата фигура ни дава ясна картина по отношение на различните позиции на двигателя и свързаните с тях зъбни механизми, които трябва да бъдат инсталирани за изпълнение на проекта:

В този дизайн ние гарантираме, че правим нещата възможно най-опростени, така че дори неспециалистът да може да разбере по отношение на включените двигателни / зъбни механизми. и нищо не остава скрито зад сложни механизми.
Работата или функцията на всеки двигател може да се разбере с помощта на следните точки:
- Двигател №1 контролира „притискането на пръста“ или захващащата система на робота. Подвижният елемент е директно окачен с вала на двигателя за движенията.
- Двигател №2 управлява лакътния механизъм на системата. Той е конфигуриран с опростен ръб, за да изпъква зъбна система за изпълнение на повдигащото движение.
- Мотор №3 е отговорен за повдигането на цялата роботизирана система на рамото вертикално, следователно този двигател трябва да бъде по-мощен от горните два. Този двигател също е интегриран с помощта на механизъм на зъбни колела за изпълнение на необходимите действия.
- Двигател # 4 контролира целия механизъм на крана в пълна хоризонтална равнина от 360 градуса, така че рамото да е в състояние да вземе или повдигне всеки предмет в рамките на пълната по посока на часовниковата стрелка или обратно на часовниковата стрелка радиален обхват.
- Двигатели №5 и 6 действат като колела за платформата, която носи цялата система. Тези двигатели могат да бъдат управлявани чрез преместване на системата без усилие от едно място на друго, а също така улеснява движението на системата на изток / запад, север / юг, просто чрез регулиране на скоростите на левия / десния двигател. Това се прави просто чрез намаляване или спиране на един от двата мотора, например, за да се инициира завой вдясно, десният мотор може да бъде спрян или спрян, докато завъртането не бъде изпълнено изцяло или до желания ъгъл. По същия начин, за иницииране на ляв завой направете същото с левия мотор.
Задното колело няма свързано с него моторче, то е шарнирно, за да се движи свободно по централната си ос и да следва маневри на предното колело.
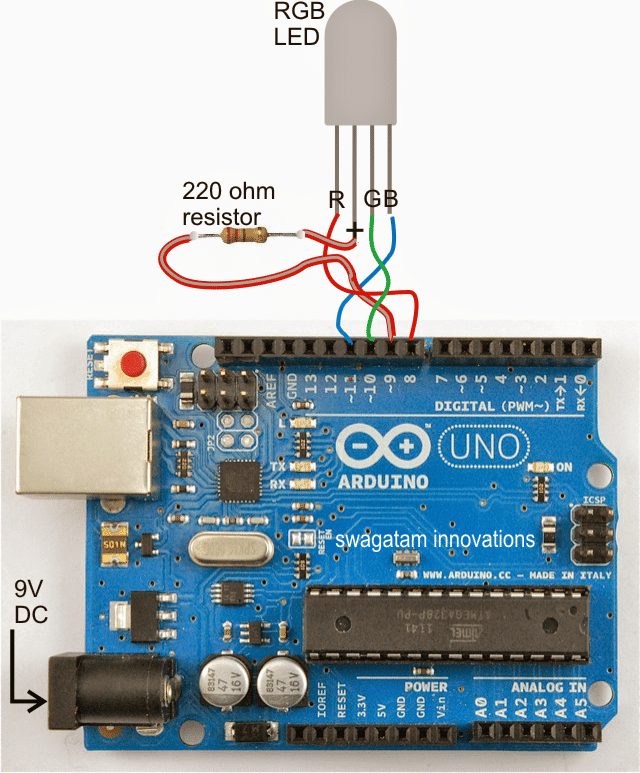
Схемата на безжичния приемник
Тъй като цялата система е проектирана да работи с дистанционно управление, безжичен приемник трябва да бъде конфигуриран с описаните по-горе двигатели. И това може да се направи, като се използва следната схема, базирана на Arduino.

Както можете да видите, има 6 серво мотора, прикрепени към изходите на Arduino и всеки от тях се управлява чрез дистанционно управлявани сигнали, уловени от прикрепения сензор NRF24L01.
Сигналите се обработват от този сензор и се подават към Arduino, който доставя обработката към съответния двигател за предвидените операции за контрол на скоростта.
Thisignals се изпращат от верига на предавател с потенциометри. Регулиращият регулатор на тези потенциометри управлява нивата на скоростта на съответните двигатели, прикрепени към гореописаната схема на приемника.
Сега нека видим как изглежда веригата на предавателя:
Модул на предавателя

Дизайнът на предавателя може да се види, като има 6 потенциометъра, прикрепен към неговата платка Arduino, а също и към друго устройство за комуникационна връзка 2,4 GHz.
Всеки от саксиите е програмиран за управление на съответния двигател свързани с веригата на приемника. Следователно, когато потребителят завърти вала на избран потенциометър на предавателя, съответният двигател на роботизираното рамо започва да се движи и да изпълнява действията в зависимост от конкретното му положение в системата.
Контролиране на претоварването на двигателя
Може да се чудите как двигателите ограничават движението си в своите подвижни диапазони, тъй като системата няма ограничаващо устройство за предотвратяване на претоварване на двигателя, след като съответните движения на механизма достигнат крайните си точки?
Смисъл, например какво се случва, ако двигателят не е спрян дори след като „захватът“ е задържал плътно обекта?
Най-лесното решение за това е да добавите индивидуално текущи модули за управление с всеки от двигателите, така че в такива ситуации двигателят да остане включен и заключен без изгаряне или претоварване.
Поради активен контрол на тока двигателите не преминават през претоварване или свръхток, и те продължават да работят в рамките на определен безопасен обхват.
Пълният програмен код може да бъде намерен в тази статия
Предишен: USB 5V аудио усилвател за компютърни високоговорители Напред: Изследвани 7 модифицирани синусоидални инверторни вериги - 100W до 3kVA