Първоначално EtherCAT е разработен от майор PLC производител, а именно Beckhoff Automation, който се използва в системи за управление в реално време и индустриална автоматизация . Beckhoff Automation разработи своя собствена версия на Fieldbus като LightBus през 80-те години за справяне с проблема с честотната лента за други интерфейси. Допълнителната работа по този протокол най-накрая доведе до изобретението EtherCAT. Beckhoff стартира протокола EtherCAT през 2003 г. в световен мащаб. След това те предоставиха правата на EtherCAT Technology Group (ETG) през 2004 г. ETG има изключително активен разработчик, както и потребителска група. Тази статия обсъжда преглед на Основи на Ethercat – работа с приложения.
Какво е Ethercat?
EtherCAT или Ethernet Control Automation Technology е индустриална мрежова система, която зависи от използваната Ethernet система за постигане на много бързи и по-добри комуникации. И така, EtherCAT е много бърза мрежа, използвана за обработка на данни със специален хардуер и софтуер. Тази мрежа използва конфигурация главен-подчинен, пълен дуплекс с всякакви мрежова топология .
Времето, необходимо за обработка на 1000 I/O точки, е 30 секунди и комуникира със 100 серво оси в рамките на 100 us. Серво осите ще получат зададени стойности, за да контролират данните и да отчитат действителното състояние. Тези оси се синхронизират чрез метод на разпределен часовник, който е проста версия на IEEE 1588 и намалява трептенето до под 1 us. EtherCAT осигурява бърз изход, тъй като съобщенията се обработват в хардуера, преди да бъдат преместени към следващия подчинен.
EtherCAT архитектура
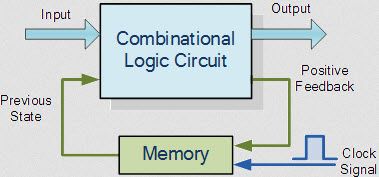
Мрежовата архитектура EtherCAT е показана по-долу, която използва принципа главен/подчинен за контролиране на достъпа до средата. В тази архитектура главният EtherCAT обикновено е системата за управление, която използва типичен Ethernet порт, както и съхранената информация за мрежова конфигурация във файла ENI (EtherCAT Network Information).

EtherCAT мрежовият информационен файл просто се създава въз основа на ESI (EtherCAT SlaveInformation) файлове, които се предоставят от търговците за всяко устройство. Тук главният възел предава кадрите към подчинените възли, които могат да вмъкват и премахват данни от тези кадри. Подчинените устройства са възли като EPOS3 моторни задвижвания, които съдържат Ethernet портове за комуникация чрез EtherCAT master. Тук главният EtherCAT е компютърно устройство, използвано за поддържане на комуникацията на данни между главния, както и различни подчинени устройства.
Как работи EtherCAT?
EtherCAT се използва за преодоляване на типичните грешки на Industrial Ethernet чрез своя режим на работа с висока производителност, където обикновено един кадър е достатъчен за предаване и получаване на контролни данни от и към всички възли. Протоколът EtherCAT е изграден на физическия слой на Ethernet, но EtherCAT използва подход за обработка в движение за транспортиране и маршрутизиране на съобщения, който също се нарича комуникация в движение, а не използване на TCP/IP.
Главните и подчинените конфигурации на EtherCAT са показани по-долу. В тази конфигурация главният на Ethercat предава пакет данни (телеграма) през всеки подчинен, който също се нарича възел.
Основната характеристика на EtherCAT е, че подчинените устройства в рамките на горната конфигурация могат да четат по друг начин просто да извличат свързаните данни, изисквани от телеграмата, и да добавят информация към телеграмата, преди да се премести във втория възел или подчинено устройство. И така, телеграмата се движи през всички свързани подчинени устройства и след това се връща към главния.

Протоколът EtherCAT изпраща телеграма от главното устройство до всички подчинени устройства, свързани в мрежата. Всяко подчинено устройство в мрежата може просто да прочете данни, приложими към това подчинено устройство, и може да добави данни към телеграмата, преди тя да се премести във втория възел.
Четенето и записването на данни е просто разрешено чрез специален ASIC на всеки подчинен на EtherCAT. При този подход всеки подчинен ще въведе минимално забавяне на процедурата и сблъсъци не са възможни.
Протоколът EtherCAT просто осигурява детерминирана комуникация в реално време, която е съвместима със синхронизирано и многоосно управление на движението, без да е необходим допълнителен хардуер за постигане на синхронизация между няколко оси.
Толерантност към грешки
В конфигурацията master & slave на EtherCAT, ако изходът на последния възел не е свързан с главния, тогава данните се връщат автоматично в друга посока чрез протокола EtherCAT. Така че клеймото за време се поддържа.
Всеки възел в горната конфигурация маркира данните, след като бъдат получени, и след това отново ги маркира, след като ги предаде на втория възел. Следователно, когато главният възел върне данните от различните възли, той лесно определя латентността на всеки възел. Предаването на данни от главния получава I/O времеви печат от всеки възел, за да направи EtherCAT много по-детерминистичен и точен.

Толерантността към грешки означава, че мрежите на EtherCAT не трябва да бъдат свързани в пръстеновидна мрежа, както е показано на горната диаграма, но тя може да бъде свързана по различни начини, като топология на дърво, топология на линии, топология на пръстен, топология на звезда и също с комбинации.
Разбира се, между подчинените и главния трябва да има свързваща лента. След като ги изключите, те не могат да работят, въпреки че мрежовата топология е много гъвкава и толерира грешки до отлично ниво.
В системите EtherCAT комутаторите не са необходими като това, което открихме в Ethernet. Достижими са дължини на кабела между възлите до 100 метра. Диференциалната сигнализация за ниско напрежение на медните кабели с усукана двойка работи при максимални скорости с много по-ниска консумация на енергия. Така че също така е възможно да се използват оптични кабели (FOC) за подобряване на скоростта и включване на галванична изолация между устройствата.
EtherCAT използва Ethernet кабел, който може да бъде в обхват до 100 метра между два възела. В допълнение, протоколът позволява предаване на данни и захранване през един кабел. Този вид връзка се използва за свързване на различни устройства като сензори с една линия. Ако разстоянието на възела е над 100 m, тогава се използва оптичен кабел като 100BASE-FX. За EtherCAT се предлага и пълната гама Ethernet окабеляване.
EtherCAT рамка
Протоколът EtherCAT използва типична Ethernet рамка, която включва минимум една или повече дейтаграми. В този кадър заглавката на дейтаграмата ще посочи какъв вид вход би искало да изпълни главното устройство:
- Четете, пишете, четете-пишете.
- Право на достъп до конкретно подчинено устройство чрез директно адресиране или право на достъп до различни подчинени устройства чрез логическо адресиране.
Логическото адресиране се използва за процеса на цикличен обмен на данни, където всяка дейтаграма адресира точна част от изображението на процеса в сегмента на протокола EtherCAT.

Всяко подчинено устройство е разпределено с един или повече адреси в това глобално адресно пространство в цялата създадена мрежа. Единична дейтаграма може да се разглежда, ако на няколко подчинени устройства са разпределени адреси в рамките на подобен регион.
В EtherCAT дейтаграмите включват информацията, свързана с достъпа до данни, като по този начин главното устройство взема решение кога да получи достъп до данните.
Безопасност на протокола
В момента безопасността е една от основните характеристики дори в областта на автоматизацията за пренос на данни, както и комуникация. И така, EtherCAT използва протокола Safety за целите на сигурността, като позволява единствена комуникационна система както за безопасност, така и за контрол на данните. Тази функция за безопасност също модифицира данните гъвкаво и разширява архитектурата на системата за сигурност и т.н.
Технологията за безопасност на протокола EtherCAT е сертифицирана от TÜV и е разработена на базата на IEC 61508 и е идентична с IEC 61784-3. Този протокол е приложим в приложения за безопасност чрез ниво на интегритет на безопасност, равно на SIL 3.
Ethercat срещу Ethernet
Разликите между EtherCAT и Ethernet са обсъдени по-долу.
|
EtherCAT |
Ethernet |
| EtherCAT е Fieldbus система, базирана на Ethernet. | Ethernet е кабелна компютърна мрежова технология. |
| Той е приложим както при меки, така и при твърди изчислителни изисквания в реално време в рамките на технологията за автоматизация. | Приложим е в LAN, MAN и WAN. |
| Международният стандарт Ethercat е IEC 61158 | Международен стандарт за Ethernet е IEEE-802.3. |
| Изисква работа главен/подчинен. | Не изисква операция главен/подчинен. |
| Нуждае се от топология, базирана на пръстен. | Не се нуждае от топология, базирана на пръстен. |
| Оптимизиран е специално за контрол в реално време. | Не е оптимизиран за контрол в реално време. |
| Той е оптимизиран, за да се пази от сблъсъци на данни. | Не е оптимизиран да се пази от сблъсъци на данни. |
Ethercat срещу Profinet
Разликите между EtherCAT и Profinet са разгледани по-долу.
|
EtherCAT |
Profinet |
| EtherCAT е един вид протокол, използван за внасяне на гъвкавостта и силата на Ethernet към индустриална автоматизация, системи за управление в реално време, системи за управление на движение и събиране на данни. | Profinet е комуникационен протокол, използван за обмен на данни между контролери и устройства. |
| EtherCAT предоставя отворено решение на много по-ниска цена в сравнение с PROFINET IRT и SERCOS III. | Profinet не предоставя отворено решение на много по-ниска цена. |
| Времето му за реакция е 0.1ms. | Времето му за реакция е <1ms. |
| Трептенето на Ethercat е < 0,1 ms. | Трептенето на Profinet е < 1ms. |
Ethercat срещу CANopen
Разликите между EtherCAT и CANopen са разгледани по-долу.
|
EtherCAT |
CANopen |
| Скоростта на автобуса в Ethercat е 100 Mbps. | Скоростта на шината в CANopen е 1 Mbps. |
| Режимът на трансфер, използван в Ethercat, е пълен дуплекс. | Режимът на трансфер, използван в CANopen, е половин дуплекс. |
| Детерминизмът или трептенето между устройствата е ниско като 1ns. | Детерминизмът или трептенето между устройствата обикновено е 100 до 200 ns. |
| Един главен се използва с един или много роби. | Единичен/мулти-главен се използва с един или много подчинени. |
| Максималното разстояние между устройствата е 100 метра. | Максималното разстояние между устройствата зависи главно от скоростта на автобуса. |
| Комуникационният порт, използван като вторичен, е USB. | Комуникационният порт, използван като вторичен, е RS232. |
Ethercat срещу Modbus
Разликите между EtherCAT и Modbus са обсъдени по-долу.
|
EtherCAT |
Modbus |
| EtherCAT е полева шинна система, базирана на Ethernet. | Modbus е сериен протокол за комуникация на данни |
| Използва обработката на принципа на летене. | Той използва символни серийни комуникационни линии. |
| EtherCAT е базиран на модела master и slave. | Modbus се основава на модел заявка-отговор. |
| Поддържа всички мрежови топологии почти. | Поддържа само линейни и звездни топологии. |
| Ethercat е детерминистичен. | Modbus не е детерминистичен, защото е базиран на TCP. |
Предимства и недостатъци
Предимствата на протокола Ethercat включват следното.
- EtherCAT е изключителна Fieldbus, използвана в приложения за управление на движение.
- Проверен е за оптимизиране на производителността на машината чрез своята гъвкава топология, детерминирана производителност и различен набор от функции.
- Той просто поддържа цялото семейство CANopen и профила на устройството на Sercos. Така че това помага на потребителите да организират EtherCAT мрежи лесно за точното приложение чрез промяна на предварително дефинирани основни профили.
- Неговата резервираност е възможна и при използване на пръстеновидна топология. EtherCAT също използва звезда, дърво, линия и топология на шината .
- Този протокол осигурява висока скорост, по-малко трафик на данни, по-малко хардуерни разходи и по-голяма точност и механизъм за синхронизиране на часовника в сравнение с Ethernet.
- Тази скорост на мрежата също може да се управлява, тъй като компютрите може да имат проблеми с обработката на по-голямото количество цикли, поради което оптимизацията в EtherCAT е постижима.
- Той поддържа почти всички топологии, така че да може да се използва в широк спектър от приложения с типичния комутатор, базиран на топология на Ethernet звезда.
- Ethernet протоколи са много сигурни, използват опростени главни файлове, пространството за данни е повече и обработката е в движение.
Недостатъците на протокола Ethercat включват следното.
- Основният недостатък на EtherCAT е, че подчинените устройства изискват вмъкване на специфичен ASIC хардуер за изпълнение на EtherCAT. Неговият модел на данни е изключително различен и също много труден за разбиране.
Приложения
The приложения на EtherCAT включват следното.
- EtherCAT е приложим в различни области поради много характеристики като отлична производителност, простота, здравина, достъпност, интегрирана сигурност и гъвкава топология. Използва се в различни области като машини, роботика, печатни преси, преси, електроцентрали, подстанции, тестови стендове, заваръчни машини, селскостопански машини, кранове и асансьори, вятърни турбини, фрезови машини, машини за избор и поставяне, опаковъчни машини, измерване системи, железни и стоманодобивни заводи, машини за хартия и целулоза, системи за управление на етапи, системи за управление на тунели и др.
- Приложим е при измерване на оборудване, медицински устройства, управление на машини, мобилни машини, множество вградени системи и автомобили.
- Той има изключително висока производителност, лесен за инсталиране и отворен протокол, базиран на приложен слой, използван в Ethernet приложения
- Това е отворена комуникационна система в реално време, толкова широко използвана в автоматизираното производство.
По този начин, това е преглед на Ethercat – работа с приложения. EtherCAT прави системите и машините по-прости, по-бързи и по-рентабилни. Това е международен IEC стандарт, който не означава изключително стабилност, но и отвореност: досега спецификациите на EtherCAT никога не са били променяни, а са разширявани само съвместимо. EtherCAT се счита за „Ethernet Fieldbus“, тъй като обединява предимствата на Ethernet със стандартната простота на Fieldbus системите и избягва сложността на ИТ технологиите. Ето един въпрос към вас, какво е Ethernet?