
ДА СЕ робот е електромеханична машина което се ръководи от верига или компютърна програма. Роботите са разменили хората в помощ при изпълнението на непрекъснати и опасни задачи, които хората решават да не правят. Присъства роботите са класифицирани в различни категории въз основа на техните характеристики и производителност като индустриални роботи, търговски роботи, сервизни роботи, мобилни роботи. Ето сервизен робот, който изпълнява непрекъснати задачи, за да приветства хората с движение на ръка, представящо „Namaste“ чрез записано гласово съобщение. Обикновено, когато каним хората у дома, на партита, на брачни функции, в офис и др. Трябва да уредим човек, който да ги поздрави и покани на входа. Ако количеството на хората е малко, тогава задачата е по-проста. Но ако поздравите стотици хора, тогава задачата е трудна. За да се преодолее този проблем, ето проект, а именно робот namaste с гласов контрол.

Робот Namaste
Namaste Robot с гласов контрол
Основната концепция на това Namaste робот проектът е да управлява различните серво мотори през дъска на Arduino. Този робот сканира околните хора и завърта главата си на 180 °. Ако разпознае някой наблизо, то пожелава този човек с Namaste с двете ръце да се притискат. Това е традиционният начин за пожелание на хората в Индия. The приложения на роботи включете в търговски центрове, паркове, офиси, за да привлечете хората.
Блокова диаграма на робота Namastae с гласов контрол
Следващата фигура означава блоковата схема на робота Namaste с гласово управление. При този вид робот се програмират гласови команди. Цялата платка за разработка може да бъде свързана към общото захранване. Описанието на всеки блок е както следва. The захранване дава захранване на всички модули. Тези модули изискват ток в mA и работното напрежение ще бъде 5V.

Блокова диаграма на робота Namastae с гласов контрол
Дъска Arduino
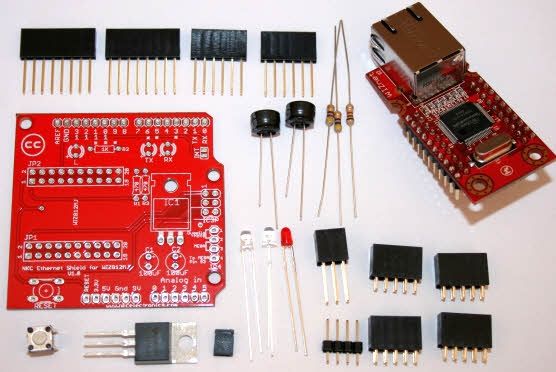
Arduino е един вид инструмент базиран на обикновена платка за микроконтролер, използвана за контрол и усещане на физическия свят от настолния компютър. За физически изчисления има различни платформи за микроконтролер. Важните характеристики на Arduino са евтин софтуер с отворен код и разширяем софтуер. Софтуерът Arduino се предлага като инструмент с отворен код и езикът може да бъде разширен чрез библиотеки C ++.

Дъска Arduino
Ping сензор
Сензорът за пинг използва SONAR за управление на разстоянието на обект в неговата близост. Това сензор се използва като очите на робота, за да усети препятствието. Например сензор за близост. Той дава отлична точност на обхвата и стабилни показания. Работата на този сензор не се влияе от черен материал или слънчева светлина. Спецификациите на пинг сензора са напрежение 5V, ток 15mA, ъгъл на сензора НЕ> = 15 и разстояние за откриване е 2 cm ~ 450 cm.

Ping сензор
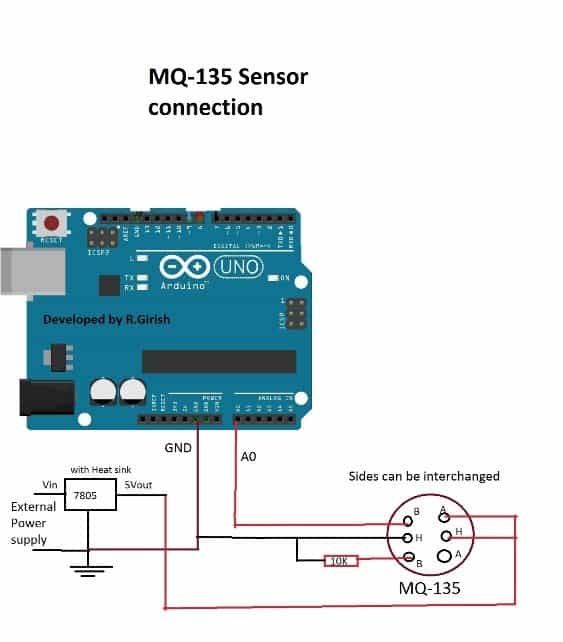
Взаимодействието на сензора за ping с Arduino е показано по-долу. Налични са четири щифта за свързване на сензора за пинг с платка Arduino. Четирите щифта на дъската Arduino са GND, VCC, ECHO и TRIGGER. Пиновете на платката са D0-D13, като 12 и 13 щифта са входни и изходни щифтове.
Микроконтролерът Arduino ни предлага библиотека за серво управление, която ни позволява да превключваме серво с лекота. В този проект използвахме 5 серво серво за регулиране на движенията на робота Namaste като глава, десен лакът, ляв лакът, дясно рамо и ляво рамо. Тук цифровите входни / изходни щифтове (D5, D6, D9, D10, D1) означават в платката Arduino, свързана към серво мотори.
IC за възпроизвеждане на глас
Този IC за възпроизвеждане на глас предлага записаното съобщение, което се възпроизвежда с предварително зададената честота. Възпроизвеждането се премества в устройството за усилване на звука.

IC за възпроизвеждане на глас
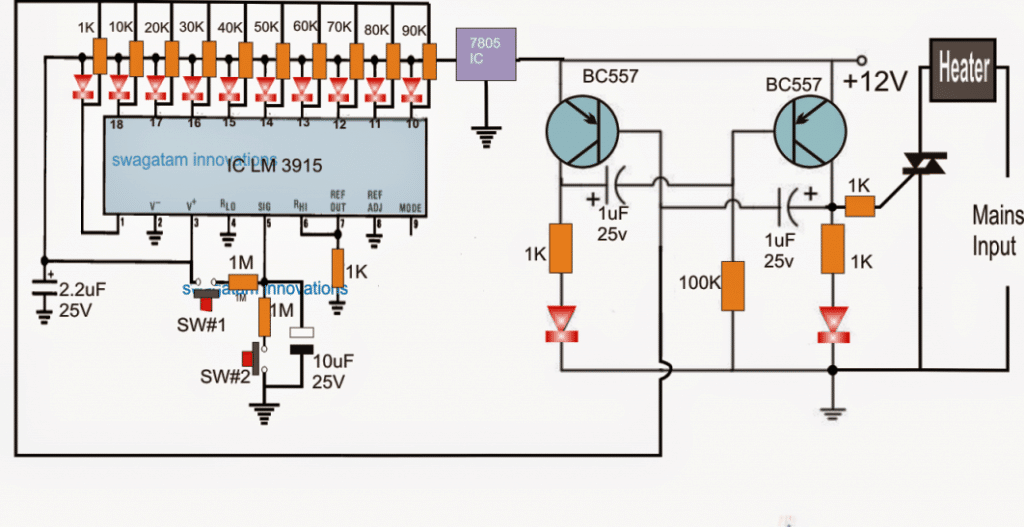
Реле
ДА СЕ релето е един вид превключвател работи електрически. Потокът на ток през бобината на релето прави магнитно поле, което приканва лост и променя контактите на превключвателя.

Реле
Гласов контрол Namastae Robot работи
Работата на робота Namaste може да се извърши стъпка по стъпка, заедно със симулираните резултати. Когато роботът Namaste е в първо състояние, тогава серво мотора s на робота 2, 3, 4, 5 са в състояние OFF или нула. Главата на робота Namaste се редува от центъра надясно, наляво и след това обратно към центъра поради завъртане на серво мотор1 от 0 ° -180 °. Движението на главата на робота уточнява, че роботът Namaste търси препятствие. Когато сензорът за пинг открие някакво препятствие, позицията на главата на робота се връща в центъра и сервомоторът1 се оставя под ъгъл от 90 ° и се изключва. Активира се в НИСКО състояние.
Когато сервомоторът1 се изключи, тогава останалите двигатели като servo4 и servo5 се включват. Сигналната линия се задейства за дясното и лявото рамене на робота Namaste. Сега ръцете на робот могат да правят движение нагоре. Раменните серво мотори са свързани с цифровите входни и изходни щифтове на платката Arduino. Но сигналните линии или тези щифтове ще бъдат високи и позицията на серво се променя на 90 °. Сега servo4 и servo 5 се изключват.
Накрая можем да заключим, че основната цел на този гласов контрол робот е да предостави услугата да посрещат любезно хората, като засичат хората, които вървят пред него. Може да се използва на различни обществени места като паркове, търговски центрове, партита и др. Надяваме се, че сте разбрали по-добре тази концепция. Освен това, всички запитвания относно тази концепция или базирани на arduino проекти за роботи , моля, дайте вашите ценни предложения, като коментирате в раздела за коментари по-долу.
Кредити за снимки:
- Дъска Arduino nyacknewsandviews
- Ping сензор паралакс
- IC за възпроизвеждане на глас кеалаб
- Реле awdirect
- Робот Namaste canstockphoto





{kind=link}
{kind=link}
{kind=link}
{kind=link}