
Въведение:
Днес много индустрии използват роботи поради тяхното високо ниво на производителност и надеждност и което е голяма помощ за хората. Роботиката за избягване на препятствия се използва за откриване на препятствия и избягване на сблъсък. Това е автономен робот. Дизайнът на робота за избягване на препятствия изисква интегрирането на много сензори според тяхната задача.
Откриването на препятствия е основното изискване на този автономен робот. Роботът получава информацията от околността чрез монтирани сензори на робота. Някои сензорни устройства, използвани за откриване на препятствия, като сензори за удари, инфрачервени сензори, ултразвукови сензори и др. Ултразвуковият сензор е най-подходящ за откриване на препятствия и е на ниска цена и има висока способност за обхват.

Роботизиран автомобил за избягване на препятствия
Принцип на работа:
Избягването на препятствия роботизирано превозно средство използва за своите движения ултразвукови сензори. За постигане на желаната операция се използва микроконтролер от 8051 семейства. Двигателите са свързани чрез микросхемата на драйвера на двигателя към микроконтролера. Ултразвуковият сензор е прикрепен пред робота.
Винаги, когато роботът върви по желания път, ултразвуковият сензор предава непрекъснато ултразвуковите вълни от главата на сензора. Винаги, когато препятствие предстои, ултразвуковите вълни се отразяват от обект и тази информация се предава на микроконтролера. Микроконтролерът управлява двигателите отляво, отдясно, отзад, отпред, въз основа на ултразвукови сигнали. За контрол на скоростта на всеки двигател се използва широчинно-импулсна модулация (ШИМ).

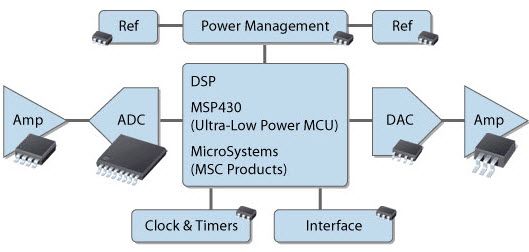
Блокова диаграма Роботизиран автомобил за избягване на препятствия
Различни сензори, използвани за избягване на препятствия Роботизиран автомобил
1. Откриване на препятствия (IR сензор):
IR сензорите се използват за откриване на препятствия. Изходният сигнал на сензора се изпраща към микроконтролера. Микроконтролерът управлява автомобила (напред / назад / стоп), като използва DC мотора, който е поставен в автомобила. Ако някакво препятствие, поставено вътре, IR сензорът не приема светлинните лъчи и подава сигнали към микроконтролера. Микроконтролерът незабавно ще спре автомобила и сирената ще се включи. След една минута роботът ще провери състоянието на пътя, ако препятствието е премахнато, роботът се отдалечава, иначе роботът ще се върне, за да премести началното място. Сензорът открива обекти, като излъчва кратък ултразвуков изблик и след това прослушва за еко. Под контрола на хост микроконтролера сензорът излъчва кратък взрив от 40 kHz. Тази експлозия се осмелява или пътува във въздуха, удря изделие и след това отново отскача до сензора. Сензорът осигурява изходен импулс на хоста, който ще прекрати, когато ехото бъде открито, поради което ширината на един импулс до следващия се взема в изчислението от програма за осигуряване на резултати на разстояние от обекта.
две. Откриване на пътя (сензор за близост):
Нормалната причина е, че и сензорите, даващи насоките, и роботът го следват, като вървят право по пътя. Когато линията завърши по това време, роботът се обръща на 180 и се връща назад на същото място.

Да сте онлайн
Сензорите за близост се използват за откриване на пътя. Когато десният сензор не бъде открит в линията на кривата, микроконтролерът задейства левия мотор, за да се завърти наляво, докато се появи сигналът от десния сензор. След като сигналът бъде открит десен сензор, двата двигателя се активират, за да продължат напред. Когато линията завърши по това време, роботът се обръща на 180 и се връща назад на същото място.

Загуба на линията
3. Ултразвуков сензор:
Ултразвуковият сензор се използва за откриване на препятствия. Ултразвуковият сензор предава ултразвуковите вълни от главата на сензора си и отново приема ултразвуковите вълни, отразени от обект.
Има много приложения, които използват ултразвукови сензори като алармени системи за инструкции, автоматични отварящи се врати и др. Ултразвуковият сензор е много компактен и има много висока производителност.

Обща диаграма на ултразвуковия сензор
Принцип на работа:
Ултразвуковият сензор излъчва кратък и високочестотен сигнал. Те се разпространяват във въздуха със скоростта на звука. Ако ударят някой предмет, те отразяват ехо сигнал към сензора. Ултразвуковият сензор се състои от мултивибратор, фиксиран към основата. Мултивибраторът е комбинация от резонатор и вибратор. Резонаторът доставя ултразвукова вълна, генерирана от вибрациите. Ултразвуковият сензор се състои от две части излъчвателя, който произвежда звукова вълна от 40 kHz и детекторът открива звукова вълна от 40 kHz и изпраща електрически сигнал обратно към микроконтролера.

Ултразвуков принцип на работа
Ултразвуковият сензор позволява на робота виртуално да вижда и разпознава обект, да избягва препятствия, да измерва разстоянието. Работният обхват на ултразвуковия сензор е от 10 см до 30 см.
Работа на ултразвуковия сензор:
Когато към ултразвуковия преобразувател се подаде електрически импулс с високо напрежение, той вибрира в определен спектър от честоти и генерира взрив на звукови вълни. Винаги, когато пред ултразвуковия сензор се появи някакво препятствие, звуковите вълни ще се отразяват под формата на ехо и генерират електрически импулс. Той изчислява времето между изпращането на звукови вълни и приемането на ехото. Моделите на ехото ще бъдат сравнени с моделите на звуковите вълни, за да се определи състоянието на открития сигнал.
Забележка: Ултразвуковият приемник трябва да открива сигнал от ултразвуковия предавател, докато предавателните вълни удрят върху обекта. Комбинацията от тези два сензора ще позволи на робота да открие обекта по пътя си. Ултразвуковият сензор е прикрепен пред робота и този сензор също ще помогне на робота да се придвижва през залата на всяка сграда.
Приложения на ултразвуков сензор:
- Автоматично превключване на пътна сигнализация
- Алармена система за нарушител
- Инструменти за броене на достъп ключове за паркиране
- Заден сонар на автомобили
Характеристики на ултразвуков сензор:
- Компактен и лек
- Висока чувствителност и високо налягане
- Висока надеждност
- Консумация на енергия от 20mA
- Импулсна входяща / изходна комуникация
- Тесен ъгъл на приемане
- Предоставя точни, безконтактни оценки на разделяне в рамките на 2 см до 3 метра
- Светодиодът за точка на експлозия показва оценки в напредъка
- 3-пинов хедър улеснява свързването с помощта на серво връзка за развитие
Приложения на роботизирано превозно средство за избягване на препятствия:
- Особено военни приложения
- Може да се използва за градски войни
Сега ясно имаме представа за концепцията на роботизираното превозно средство, използващо ултразвуков сензор за откриване на препятствия, ако има допълнителни въпроси по тази тема или концепцията за електрическите и електронните проекти, оставете коментарите по-долу.
Снимка:
- Обща диаграма на ултразвуковия сензор от Letsmakerobots
- Принцип на работа на ултразвуков сензор от Микрозвуков








{kind=link}