Постът обяснява просто препятствие за избягване на роботизирана верига без микроконтролер и без използване на специални схеми на моторни драйвери или интегрални схеми. Идеята е поискана от г-н Faiyyaz
Дизайнът
По принцип е под формата на движещо се превозно средство който е в състояние да открие и избегне потенциални препятствия по пътя си и да промени посоката си по подходящ начин, така че движението му да остане непрекъснато, просто!
По този начин операцията е автоматична, без никаква ръчна или човешка намеса.
Представената идея за робот, който избягва препятствия без микроконтролер, както подсказва името, не използва микроконтролер и следователно е изключително лесна за изграждане и подходяща за всеки нов любител.
Докато проектирах схемата, осъзнах, че за да се приложи принципът, ще са необходими поне няколко модула на сензора за препятствия, тъй като използването на един модул може да причини нестабилно движение на двигателя и може да не помогне за плавно отклоняване или завъртане на автомобила към свободен път.
Настроеният мотор на превозното средство е доста подобен на дистанционно управление играчка кола което бях обсъждал в една от по-ранните публикации.
Следващата схема представлява един от модулите на системата и следователно два или чифт такива модули ще са необходими от дясната и лявата страна на автомобила.
Идеята е проста и работи без микроконтролер и без специални интегрални схеми на драйвера на двигателя. Това означава, че можете да го направите без каквото и да е кодиране и без да използвате какъвто и да е сложен IC драйвер на двигателя ..... и веригата ви позволява да използвате всеки двигател с постоянен ток, независимо от неговата мощност, така че дори превозни средства с голяма мощност, избягващи препятствия, могат да бъдат направени с помощта на тази схема, които обикновено се използват в молове и подобни търговски обекти.
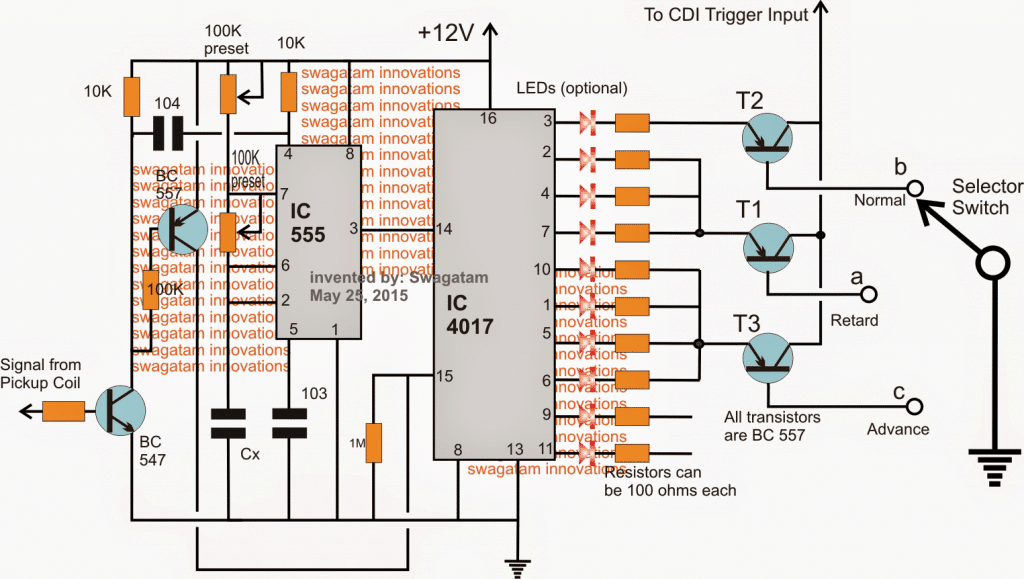
Електрическа схема

Сега нека се опитаме да разберем горната схема с помощта на следното обяснение:
Как работи
IC 555 е конфигуриран като IR предавател и е настроен да генерира постоянна честота от 38kHz, докато прилежащата транзисторизирана верига е конфигурирана като степен на приемник или степен на IR сензор.
Да приемем, че това е модулът от дясната страна и да предположим, че този модул е първият, който открива препятствие по пътя.
Следователно, веднага щом се открие препятствие, 38kHz честота, генерирана от 555 IC, се отразява към сензора на прилежащата верига на приемника.
Приемникът незабавно активира свързаните транзистори, така че крайният транзистор на драйвера е възпрепятстван от провеждането.
Сега двигателят, който се управлява от този транзистор, трябва да бъде разположен от лявата страна на превозното средство, която е от противоположната страна на този модул ... по същия начин двигателят, разположен от дясната страна, всъщност се управлява от левия страничен модул .
Следователно, когато горепосоченият модул за откриване на препятствия от дясната страна се активира, той спира двигателя от лявата страна, докато двигателят от дясната страна има право да се движи нормално.
Тази ситуация води до принуждаване на превозното средство да отклони лявата страна ... което означава, че сега приетият ляв модул започва да получава още по-силни сигнали за препятствия и продължава да принуждава превозното средство да продължи по-трудно по текущото отклонение, докато напълно не е избегнало препятствието . Сега модулът спира да получава сигнали за препятствия и превозното средство започва да се движи нормално напред по новия си път.
Докато горното отклоняване се извършва, левият страничен модул е принуден да става все по-изолиран и далеч от препятствието, така че да не получи възможност да се намесва в процедурата и да позволява чисто и плавно отклоняване на превозното средство.
Прилагат се същите процедури, в случай че модулът от лявата страна усети препятствието пред десния модул, при което превозното средство е принудено да се движи все по-силно към дясната страна.
Можем да видим и етап на деактивиране на веригата в модула, които са свързани помежду си отляво и отдясно. Този етап е въведен нарочно, за да се гарантира, че и двата модула никога не се активират заедно.
Следователно, ако левият страничен модул стане първият, който открие препятствие, той незабавно деактивира десния страничен модул и инициира отклоняването на превозното средство отдясно и обратно.
IC на сензора може да бъде стандартна серия TSOP17XX
За повече информация относно горната интегрална схема на сензора можете да научите как да свържа TSOP1738 IC
И двигателят трябва да бъде оборудван със скоростни кутии, така че движението първоначално да се поддържа на контролирано ниво.
Настройка на колелото
Пълната настройка на левия и десния модул и свързаните с тях електрически връзки може да се види на фигурата по-долу:

Актуализиране
Малко размисъл ни казва, че горната проста пречка за избягване на роботизирана верига също може да бъде реализирана чрез използване на един модул, вместо на двата.
Въпреки това, един модул би позволил на превозното средство да извърши едностранно отклонение всеки път, когато открие препятствие, поради което системата може да бъде конфигурирана или да отклонява по посока на часовниковата стрелка, или отклонение в посока, обратна на часовниковата стрелка, в зависимост от това кой двигател е свързан с веригата за действията.
Примерът за настройка може да бъде визуализиран в следното изображение:

Изглежда обаче, че има един проблем с настройката на горния единичен двигател. Ако предположим, че превозното средство среща ляв ъгъл под прав ъгъл. Това ще принуди превозното средство да продължи да се движи обратно на часовниковата стрелка, докато вземе обратен завой и започне да се движи обратно в същата посока от мястото, от което е започнало. Това не е нещо, което потребителят би оценил.
Предишна: SMD резистори - въведение и работа Напред: Как работи акселерометърът