Въведение в роботи
Роботът е машина, която прилича на човешки същества. Това е програмирано да направи нещо. Думата Робот идва от славянската дума robota (което означава принудителен работник). Роботът е разработен през 1960 г. Роботите са изработени от метали и смесител от други елементи. Роботите просто командват и това, което хората казват. Преди 30 години роботите бяха нещо в научно-фантастичния филм. Но днес роботиката се използва в много области. И е много важно за бъдещето на човечеството. The роботизирани технологии се подобряват в помощ на националната отбрана, здравеопазването, производството, националната сигурност, образованието, потребителските стоки и много различни сектори. Вече лекарите използват роботика в специални операции. Роботите са важни, защото изпълнява задачи, които са опасни и невъзможни за човека.
5 причини, поради които роботите са били популярни
- Скорост
- Опасна среда
- Повтарящи се задачи
- Ефективност
- Точност
Скорост:
Роботите могат да се използват, тъй като те са по-бързи от хората при изпълнение на задачи. Роботът наистина е механизъм, който се управлява от компютър. Знаем, че компютрите могат да извършват изчисления и да обработват данни много бързо в сравнение с хората. Някои роботи всъщност се движат по-бързо и изпълняват дадена задача, например взимане и вмъкване на предмети, по-бързо от човешкото.
Опасни среди:
Роботите могат да се използват в опасна среда, тъй като те могат да работят на място, където човек би бил в опасност. Например роботът може да бъде проектиран да понася по-голямо количество топлина, радиация, химически изпарения, отколкото хората биха могли.
Повтарящи се задачи:
Понякога роботите не са много по-бързи от хората, но са добри в това да вършат една и съща работа отново и отново. Това е лесно за робота, тъй като след като роботът е програмиран да върши работа веднъж, същата програма може да се изпълни много пъти, за да изпълни работата много пъти. И роботът няма да се отегчи, както би го направил човек.
Ефективност:
Ефективността е свързана с изпълнението на задачи без отпадъци. Това означава
- Не губи време
- Не губи материали
- Не губи енергия
Точност:
Точността е свързана с много точно изпълнение на задачите. Във фабричните производствени артикули всеки елемент трябва да бъде направен еднакво. Когато се сглобяват елементи, роботът може да позиционира части в рамките на част от милиметър.
Управление на робот
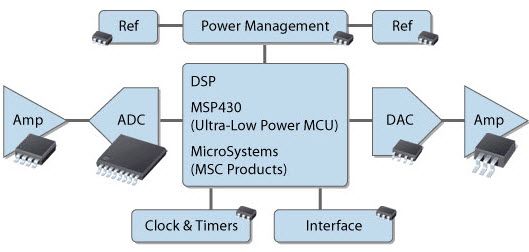
Основният робот или роботизирана система се състои от твърдо тяло, в което се помещава цялата верига на робота. Схемата се състои от сензори, които усещат всякакви промени в околната среда и подават тази информация към контролния блок.
Въз основа на входа от сензорите, управляващият блок съответно управлява задвижванията. По този начин основната операция на робота е в контролния блок. В някои приложения роботът е напълно автоматичен, т.е.контролът се намира в самото устройство и въз основа на някои сензорни блокове, задвижванията се управляват автоматично от контролния блок. В някои приложения роботът се управлява ръчно.
Нека видим два начина за ръчно управление на робота
- Използване на мобилен телефон
- Използване на дистанционно за телевизор
Роботизиран автомобил, контролиран от мобилен телефон:
Когато говорим за безжични роботизирани превозни средства , ние обикновено мислим за RF технологични схеми. Но този проект е съвсем различен. Той използва мобилен телефон за управление на движението на роботизираното превозно средство. Тук използвахме технологията DTMF за управление на роботизираното превозно средство с помощта на мобилния телефон. Използвахме два мобилни телефона, единият е свързан с робот, а другият е потребителски телефон. Между тези две мобилни устройства се установява комуникация и ако се натисне някой клавиш, този тон се чува до друг край на клетката. Този тон се нарича „двучестотен многочестотен“ тон (DTMF).

Роботизирано превозно средство, контролирано от мобилен телефон

Контролирана от мобилен телефон роботизирана схема на автомобила
Този проект е предназначен да разработи a роботизирано превозно средство който се контролира от мобилния телефон. Това се основава на 8051 микроконтролер. Двата мобилни телефона контролират робота според изискванията. Един мобилен телефон е свързан с робота, а друг е потребителска клетка. Когато клавиш, натиснат на потребителския мобилен телефон, генерира съответния тон, той се получава в друга клетка. Полученият тон се обработва от микроконтролера с помощта на DTMF декодера. Декодерът декодира DTMF тона в двоични цифри и тези двоично кодирани данни се изпращат към микроконтролера. Въз основа на входа от мобилния телефон, микроконтролерът съответно подава правилни сигнали към драйвера на двигателя да завърти всеки от двигателя в желаната посока. Например при натискане на определен номер на потребителския мобилен телефон повикването автоматично се набира до системния мобилен телефон. Системният мобилен телефон е свързан с DTMF декодера, който съответно декодира тона и двигателят се завърта в посоката, съответстваща на натиснатия номер.
IR контролирано роботизирано превозно средство:
В тази система главно роботизиран автомобил се управлява от дистанционното на телевизора. Инфрачервеният (IR) сензор е свързан към блока за управление на робота за отчитане на дистанционния сигнал. Тази информация се предава на контролния блок, който премества робота според изискването. Като система за управление се използва микроконтролер.
В това IR дистанционно се използва като предавател. Точката, когато бутонът е натиснат в дистанционното, сигналът ще бъде преминат и приет от ИЧ приемника. Този знак се изпраща до микроконтролера, който декодира сигнала и извършва съответното движение според бутона, натиснат в дистанционното. Например, ако натиснете номер 1 в дистанционното, роботът ще бъде обърнат наляво според нашето изискване. Тестът за останалите предприятия (напред, назад и вдясно) ще се извърши по сравнителен начин, като се използва IR. В приемащия край развитието се постига от два мотора, които са свързани към микроконтролера.
Програмата е написана, т.е. докато се изпълнява, тя изпраща команди към IC на драйвера на двигателя според нейното изискване за задвижване на двигателя за движението на робота, както е обяснено по-горе.

Блок-схема на роботизиран автомобил с IR контрол
Ако имате съмнения относно тази статия, моля, оставете коментар. И да ме уведомите за повече приложения и методи, свързани с това?