Сервомоторите са автономни механични устройства, които се използват за управление на машините с голяма точност. Те се намират в много приложения от играчки до индустриална автоматизация. Има различни видове двигатели, но серво моторите са специално проектирани за специфично ъглово положение за управление на машините. Обикновено серво моторът се използва за управление на ъгловото движение между 0 ° до 180 ° и 0 ° до 90 °. The принцип на работа на серво мотора въз основа на ШИМ ( широчинно импулсна модулация ) импулси.

Серво мотор
Интерфейс на серво мотора с микроконтролер 8051
Серво мотор е един от най-често използваните двигатели за прецизно ъглово движение. Предимството на използването на серво мотор е, че ъгловото положение на двигателя може да се контролира без механизъм за обратна връзка. Сервомоторите обикновено се използват в търговски и промишлени приложения . Те също така се използват широко в задвижващи системи като роботи, самолети и др.

Взаимодействие на серво мотор с микроконтролер 8051
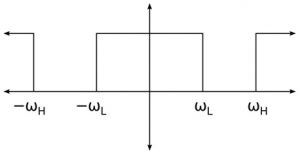
Принципът на работа на хоби серво мотора е много лесен, той се състои от три проводника, където два от тях (черен и червен) са използвали за захранване, а третият проводник се използва за подаване на контролен сигнал. Модулирани с широчина на импулса (PWM) се използват като управляващи сигнали и ъгловото положение се определя от ширината на импулса на управляващия вход. В тази статия използваме серво мотор с ъгъл на въртене от 0-180 ° и ъглово положение може да се контролира чрез промяна на работните цикли между 1ms и 2ms.
Тук сервомоторът взаимодейства с 8051 микроконтролер , черният проводник, свързан към заземяващия щифт и двигателят получават захранването от червения проводник. Управлението на свързан серво мотор port0 на 8051 микроконтролер. Кристалният осцилатор 11.0592MHz се използва за осигуряване на тактовия импулс към микроконтролера и керамични кондензатори 22pf, използвани за стабилизиране на работата на кристала. Кондензатор 10KΩ и 10uf се използва за осигуряване на захранването при нулиране на микроконтролера.
Управление на серво мотор с ъглови ротации
Принципът на работа на серво мотора зависи главно от работните цикли. Той използва вълни с модулирана широчина на импулса (PWM) като управляващи сигнали. Ъгълът на въртене се определя от широчината на импулса на контролния щифт. Тук сервомоторът се използва за ъгъл на въртене от 0 до 180 градуса. Можем да контролираме точното ъглово положение, като променяме импулса между 1ms и 2ms.

Управление на серво мотор с ъглови завъртания
Програмиране на серво мотор с ъглови завъртания
#include
Sbit servomotor_pin = P0 ^ 5
Забавяне на празнотата (неподписан int)
Void servo_delay (неподписан int)
Главно празно ()
{
Сервомотор_пин = 0x00
Направете
{
// завъртане на 0 °
Сервомотор_пин = 0x01
Sevo_delay (50)
Сервомотор_пин = 0x00
Забавяне (1000)
// завъртане на 90 градуса
Сервомотор_пин = 0x01
Sevo_delay (82)
Сервомотор_пин = 0x00
Забавяне (1000)
// завъртане на 180 градуса
Сервомотор_пин = 0x01
Sevo_delay (110)
Сервомотор_пин = 0x00
Забавяне (1000)
Докато (1)
}
}
Забавяне на празнотата (неподписано int a)
{
Неподписан int p
За (p = 0p
}
Void servo_delay (неподписан int a)
{
Неподписан int p
За (p = 0p
}
Принцип на работа на серво мотора
Принципът на работа на серво мотора зависи главно от „правилото на лявата ръка на Флеминг“. По принцип серво моторите са адаптирани с DC двигатели , датчик за положение, редуктор на редуктора и електронна схема. Двигателите с постоянен ток се захранват от батерия и работят с висока скорост и нисък въртящ момент. Сглобихме вал и предавка, свързани към двигатели с постоянен ток, след което можем да увеличаваме и намаляваме скоростта на двигателя постепенно.
Сензорът за положение разпознава местоположението на вала от фиксираното му положение и изпраща информацията към управляващата верига. Контролната верига декодира сигналите съответно от датчика за положение и сравнява действителното местоположение на двигателите с предпочитаното положение и съответно контролира посоката на въртене на постояннотоковия двигател, за да получи необходимото положение. Обикновено серво моторът изисква захранване от 4,8 V до 6 V DC.
Управлението на серво мотора чрез команди от сериен порт
Основното намерение на този проект е да управлява серво мотора с помощта на персонален компютър. Той се нуждае от една контролна линия от микроконтролера и серийния входен ред, от серийния порт на персоналния компютър, за да изпраща команди към веригата. Източникът на времето се осигурява от кристалния осцилатор. Проектирана верига на серво мотор, свързана към компютъра с помощта на сериен кабел и превключвател на нивото, след което отворете софтуера „Hyper Terminal“ в компютъра, за да изберете компонент на компютъра.

Управление на серво мотора чрез команди от сериен порт
След като командите бъдат изпратени от личния компютър (компютър) към микроконтролера през хипер терминала с нивелир, микроконтролерът получава тези данни и ги сравнява с предварително зададените данни и генерира съответни сигнали, за да активира драйвера на двигателя, за да го задвижва в желаната скорост. Много проекти за микроконтролер разработен на базата на серво мотор като балансиращи роботи, хеликоптери за писта и т.н. Можем да използваме сервомотор за целите на сигурността, като взаимодействаме с безжична камера, тъй като можем да контролираме отклонението на камерата 360.
Самобалансиращ се робот
Самобалансиращият се робот е в състояние да се балансира с помощта на серво мотори. Този робот е сглобен с помощта на структурни, механични и електронни компоненти, което създава видимо небалансирана платформа, която е силно готова да се преобърне в едно подравняване. Колелата на робота могат да се въртят независимо по два начина, задвижвани от серво мотор. Информация за ъгъла на устройството спрямо земята ще бъде получена от сензори за наклон на устройството.

Самобалансиращ се робот
Сензорът за наклон може да бъде акселерометър, жироскопичен сензор или IR сензор (за измерване на разстояние до земята). Сензорите изпращат информация към управляващото устройство, което ще обработва обратната връзка, използвайки основен пропорционален, интегрален, производен (PID) алгоритъм, за да генерира компенсиращи сигнали за управление на позицията към сервомоторите, за да балансира устройството.
Сервомоторни приложения
- Използва се в прес машини за рязане на парчетата по размер
- Използва се в бензиностанцията за захар
- Използва се в приложения за етикетиране
- Използва се опаковъчна система с функция за произволно синхронизиране
- Използва се в самолети
Предимства на серво мотора
- Ако двигателят получи голямо натоварване, водачът ще увеличи тока към бобината на двигателя при усилията си да завърти двигателя. Главно няма състояние извън стъпката.
- Високоскоростната работа е възможна от сервомоторите.
Това е всичко за принципа на работа на серво мотора и взаимодействие с 8051 микроконтролер Освен това, за всяка техническа помощ по отношение на тази статия или проекти за електроника които са проектирани с помощта на устройства за свързване като RTC, OLED, флаш памет, персонализиран LCD, сензорни екрани и др. Можете да се обърнете към нас, като дадете вашите коментари в раздела за коментари по-долу.