
Както подсказва името, тази статия ще даде точна представа за структурата и работата на PID контролера. Въпреки това, навлизайки в подробности, нека да дадем въведение за PID контролерите. PID контролерите се намират в широк спектър от приложения за управление на промишлени процеси. Приблизително 95% от операциите със затворен цикъл на индустриална автоматизация сектор използват PID контролери. PID означава пропорционално-интегрално-производно. Тези три контролера са комбинирани по такъв начин, че да произвежда контролен сигнал. Като контролер за обратна връзка, той осигурява контролния изход на желаните нива. Преди да бъдат измислени микропроцесорите, PID управлението е реализирано от аналоговите електронни компоненти. Но днес всички PID контролери се обработват от микропроцесорите. Програмируеми логически контролери имат и вградените инструкции за PID контролер. Поради гъвкавостта и надеждността на PID контролерите, те традиционно се използват в приложения за управление на процеси.
Какво е PID контролер?
Терминът PID означава пропорционално интегрално производно и е един вид устройство, използвано за управление на различни променливи на процеса като налягане, дебит, температура и скорост в промишлени приложения. В този контролер се използва устройство за обратна връзка с контролна верига за регулиране на всички променливи на процеса.
Този тип контрол се използва за задвижване на система в посока на обективно местоположение, иначе ниво. Почти навсякъде е за контрол на температурата и се използва в научни процеси, автоматизация и безброй химикали. В този контролер обратната връзка с затворен цикъл се използва за поддържане на реалния изход от метод като близо до целта, иначе изход в точката на фиксиране, ако е възможно. В тази статия се обсъжда дизайнът на PID контролера с използваните в тях режими на управление като P, I & D.
История
Историята на PID контролера е, че през 1911 г. първият PID контролер е разработен от Elmer Sperry. След това, TIC (Taylor Instrumental Company) е внедрен бивш пневматичен контролер с напълно регулируема през 1933 година. След няколко години контролните инженери отстраниха грешката в стационарно състояние, която се намира в пропорционалните контролери, като пренастроиха края на някаква фалшива стойност, докато грешката не беше нула.
Това пренастройване включва грешката, която е известна като пропорционално-интегрален контролер. След това, през 1940 г., първият пневматичен PID контролер е разработен чрез производно действие за намаляване на проблемите с превишаване.
През 1942 г. Ziegler & Nichols въвеждат правила за настройка, за да открият и зададат подходящите параметри на PID контролерите от инженерите. Най-накрая, автоматичните PID контролери се използват широко в индустрията в средата на 1950 г.
Блок-схема на PID контролера
Система със затворен цикъл като PID контролер включва система за контрол на обратната връзка. Тази система оценява променливата на обратната връзка, използвайки фиксирана точка, за да генерира сигнал за грешка. Въз основа на това той променя изхода на системата. Тази процедура ще продължи, докато грешката достигне нула, в противен случай стойността на променливата за обратна връзка стане еквивалентна на фиксирана точка.
Този контролер осигурява добри резултати в сравнение с контролера тип ON / OFF. В контролера тип ON / OFF са налице само две условия за управление на системата. След като стойността на процеса е по-ниска от фиксираната точка, тя ще се включи. По същия начин ще се изключи, когато стойността е по-висока от фиксирана стойност. Изходът не е стабилен при този вид контролер и той ще се люлее често в областта на фиксираната точка. Този контролер обаче е по-стабилен и точен в сравнение с контролера тип ON / OFF.

Работа на PID контролер
Работа на PID контролер
С използването на евтин прост ON-OFF контролер са възможни само две състояния на управление, като напълно включено или напълно изключено. Използва се за приложение с ограничен контрол, когато тези две състояния на контрол са достатъчни за целта на контрола. Въпреки това колебателният характер на този контрол ограничава използването му и следователно той се заменя с PID контролери.
PID контролерът поддържа изхода по такъв начин, че да има нулева грешка между променливата на процеса и зададената стойност / желания изход чрез операции със затворен цикъл. PID използва три основни поведения за контрол, които са обяснени по-долу.
P- контролер
Пропорционалният или P-контролер дава изход, който е пропорционален на текущата грешка e (t). Той сравнява желаната или зададена точка с действителната стойност или стойността на процеса на обратна връзка. Получената грешка се умножава с пропорционална константа, за да се получи изходът. Ако стойността на грешката е нула, тогава този изход на контролера е нула.

P-контролер
Този контролер изисква отклонение или ръчно нулиране, когато се използва самостоятелно. Това е така, защото никога не достига стабилно състояние. Той осигурява стабилна работа, но винаги поддържа грешка в стационарно състояние. Скоростта на реакцията се увеличава, когато пропорционалната константа Kc се увеличи.

Отговор на P-контролера
I-контролер
Поради ограничението на p-контролера, където винаги съществува отместване между променливата на процеса и зададената точка, е необходим I-контролер, който осигурява необходимите действия за премахване на грешката в стационарно състояние. Той интегрира грешката за определен период от време, докато стойността на грешката достигне нула. Той съдържа стойността на устройството за окончателно управление, при което грешката става нула.

PI контролер
Интегралният контрол намалява изхода си, когато възникне отрицателна грешка. Ограничава скоростта на реакция и влияе на стабилността на системата. Скоростта на реакцията се увеличава чрез намаляване на интегралното усилване, Ki.

Отговор на PI контролера
На горната фигура, тъй като усилването на I-контролера намалява, грешката в стационарно състояние също продължава да намалява. В повечето случаи PI контролерът се използва особено там, където не се изисква високоскоростна реакция.
Докато използвате PI контролера, изходът на I-контролера е ограничен до известен обхват за преодоляване на интегрална ликвидация условия, при които интегралната продукция продължава да се увеличава дори при нулево състояние на грешка, поради нелинейности в инсталацията.
D-контролер
I-контролерът няма способността да предсказва бъдещото поведение на грешка. Така че той реагира нормално, след като зададената точка бъде променена. D-контролерът преодолява този проблем, като предвижда бъдещото поведение на грешката. Изходът му зависи от скоростта на промяна на грешката по отношение на времето, умножена по производна константа. Той дава старт на изхода, като по този начин увеличава реакцията на системата.

PID контролер
В горната фигура отговор на D, контролерът е повече, в сравнение с PI контролера, а също така времето за уреждане на изхода е намалено. Подобрява стабилността на системата, като компенсира фазовото забавяне, причинено от I-контролера. Увеличаването на деривативното усилване увеличава скоростта на реакция.

Отговор на PID контролера
И така, накрая забелязахме, че чрез комбинирането на тези три контролера можем да получим желания отговор на системата. Различните производители проектират различни PID алгоритми.
Видове PID контролер
PID контролерите са класифицирани в три типа като ON / OFF, пропорционални и стандартни контролери. Тези контролери се използват въз основа на системата за управление, потребителят може да използва контролера за регулиране на метода.
ON / OFF контрол
Методът за включване и изключване е най-простият тип устройство, използвано за контрол на температурата. Изходът на устройството може да бъде ВКЛ. / ИЗКЛ. Без централно състояние. Този контролер ще включи изхода просто след като температурата премине фиксираната точка. Лимитният контролер е един определен вид ON / OFF контролер, който използва фиксиращо реле. Това реле се нулира ръчно и се използва за изключване на метод след достигане на определена температура.
Пропорционален контрол
Този вид контролер е предназначен за премахване на циклирането, което е свързано чрез управление ON / OFF. Този PID контролер ще намали нормалната мощност, която се подава към нагревателя, след като температурата достигне фиксираната точка.
Този контролер има една функция за управление на нагревателя, така че да не надвишава фиксираната точка, но ще достигне фиксираната точка, за да поддържа стабилна температура.
Този пропорционален акт може да се постигне чрез включване и изключване на изхода за малки периоди от време. Това пропорционално регулиране на времето ще промени съотношението от ON време към OFF време за контрол на температурата.
Стандартен тип PID контролер
Този тип PID контролер ще обедини пропорционален контрол чрез интегрален и производен контрол, за да подпомогне автоматично устройството да компенсира модификациите в системата. Тези модификации, интегрални и производни се изразяват в базирани на времето единици.
Тези контролери също са посочени чрез техните реципрочни, RATE & RESET съответно. Условията на PID трябва да бъдат коригирани отделно, в противен случай да бъдат настроени на конкретна система с пробната, както и грешка. Тези контролери ще предлагат най-прецизния и стабилен контрол от 3-те типа контролери.
PID контролери в реално време
Понастоящем на пазара се предлагат различни видове PID контролери. Тези контролери се използват за индустриални изисквания за контрол като налягане, температура, ниво и дебит. След като тези параметри се контролират чрез PID, изборът включва използване на отделен PID контролер или PLC.
Тези отделни контролери се използват навсякъде, където иначе се изисква да се проверят два контура, както и да се контролират в противен случай в условията, където е сложно отдясно на влизане през по-големи системи.
Тези контролни устройства предоставят различни възможности за самостоятелно и двуконтурно управление. Самостоятелният тип PID контролери предоставят няколко конфигурации с фиксирана точка, за да генерират автономни няколко аларми.
Тези самостоятелни контролери включват предимно PID контролери от Honeywell, температурни контролери от Yokogawa, автонастройки от OMEGA, Siemens и ABB контролери.
PLC се използват като PID контролери в повечето от приложенията за индустриален контрол Подреждането на PID блокове може да се извърши в рамките на PAC или PLC, за да се осигури превъзходен избор за точен PLC контрол. Тези контролери са по-умни и мощни в сравнение с отделните контролери. Всеки PLC включва PID блока в рамките на софтуерното програмиране.
Методи за настройка
Преди да започне работата на PID контролера, той трябва да бъде настроен така, че да отговаря на динамиката на процеса, който трябва да се контролира. Дизайнерите дават стойностите по подразбиране за термини P, I и D, като тези стойности не могат да дадат желаната производителност и понякога водят до нестабилност и бавен контрол. Различни видове методи за настройка са разработени за настройка на PID контролерите и изискват много внимание от оператора, за да се изберат най-добрите стойности на пропорционални, интегрални и производни печалби. Някои от тях са дадени по-долу.
PID контролерите се използват в повечето индустриални приложения, но човек трябва да знае настройките на този контролер, за да го регулира правилно, за да генерира предпочитания изход. Тук настройката не е нищо друго освен процедурата за получаване на идеален отговор от контролера чрез задаване на най-добрите пропорционални печалби, интегрални и производни фактори.
Желаният изход на PID контролера може да бъде получен чрез настройка на контролера. Налични са различни техники за получаване на необходимия изход от контролера, като проба и грешка, Zeigler-Nichols и крива на реакция на процеса. Най-често използваните методи са проба и грешка, Zeigler-Nichols и др.
Метод за проба и грешка: Това е прост метод за настройка на PID контролера. Докато системата или контролерът работи, ние можем да настроим контролера. При този метод, първо, трябва да зададем стойности Ki и Kd на нула и да увеличим пропорционалния член (Kp), докато системата достигне трептящо поведение. След като се трепне, коригирайте Ki (интегрален термин), така че трептенията да спрат и накрая коригирайте D, за да получите бърза реакция.
Техника на кривата на реакцията на процеса: Това е техника за настройка с отворен цикъл. Той произвежда отговор, когато към системата се прилага стъпков вход. Първоначално трябва да приложим някакъв контролен изход към системата ръчно и да запишем кривата на отговор.
След това трябва да изчислим наклон, мъртво време, време на нарастване на кривата и накрая да заместим тези стойности в уравненията P, I и D, за да получим стойностите на печалбата на PID членове.

Крива на реакцията на процеса
Метод на Zeigler-Nichols: Zeigler-Nichols предложи методи със затворен цикъл за настройка на PID контролера. Това са методът на непрекъснато циклиране и методът на затихващи трептения. Процедурите за двата метода са еднакви, но поведението на трептенията е различно. В това, първо, трябва да зададем константата на p-контролера, Kp на определена стойност, докато стойностите Ki и Kd са нула. Пропорционалното усилване се увеличава, докато системата се колебае с постоянна амплитуда.
Коефициент на усилване, при който системата произвежда постоянни трептения, се нарича крайно усилване (Ku), а периодът на трептения - краен период (Pc). След като се достигне, можем да въведем стойностите на P, I и D в PID контролера от таблицата Zeigler-Nichols зависи от използвания контролер като P, PI или PID, както е показано по-долу.

Маса на Zeigler-Nichols
Структура на PID контролера
PID контролерът се състои от три термина, а именно пропорционален, интегрален и производен контрол. Комбинираната работа на тези три контролера дава стратегия за управление за управление на процеса. PID контролер манипулира променливите на процеса като налягане, скорост, температура, дебит и др. Някои от приложенията използват PID контролери в каскадни мрежи, където два или повече PID се използват за постигане на контрол.

Структура на PID контролера
Горната фигура показва структурата на PID контролера. Състои се от PID блок, който дава изхода си към блока на процеса. Процесът / инсталацията се състои от крайни контролни устройства като изпълнителни механизми, контролни клапани и други контролни устройства за управление на различни процеси в индустрията / инсталацията.
Сигнал за обратна връзка от технологичната инсталация се сравнява със зададена точка или референтен сигнал u (t) и съответният сигнал за грешка e (t) се подава към алгоритъма PID. Според пропорционалните, интегрални и производни контролни изчисления в алгоритъма, контролерът произвежда комбиниран отговор или контролиран изход, който се прилага към устройствата за управление на инсталацията.
Всички контролни приложения не се нуждаят от трите контролни елемента. Комбинации като PI и PD контроли много често се използват в практически приложения.
Приложения
Приложенията на PID контролера включват следното.
Най-доброто приложение на PID контролера е контрол на температурата, където контролерът използва вход на температурен сензор и изходът му може да бъде свързан с контролен елемент като вентилатор или нагревател. Като цяло този контролер е просто един елемент в системата за контрол на температурата. Цялата система трябва да бъде изследвана, както и обмислена, докато избирате правилния контролер.
Контрол на температурата на пещта
Като цяло пещите се използват за включване на отопление, както и задържане на огромно количество суровина при огромни температури. Обикновено заетият материал включва огромна маса. Следователно е необходимо голямо количество инерция и температурата на материала не се променя бързо, дори когато се прилага огромна топлина. Тази характеристика води до умерено стабилен PV сигнал и позволява на производния период да се коригира ефективно за неизправност без екстремни промени нито на FCE, нито на CO.
MPPT контролер за зареждане
V-I характеристиката на фотоволтаичната клетка зависи главно от температурния диапазон, както и от облъчването. В зависимост от метеорологичните условия токът и работното напрежение ще се променят постоянно. Така че е изключително важно да се проследява най-високата PowerPoint на ефективна фотоволтаична система. PID контролерът се използва за намиране на MPPT, като дава фиксирани точки на напрежение и ток на PID контролера. След като метеорологичните условия се променят, тракерът поддържа ток и напрежение стабилни.
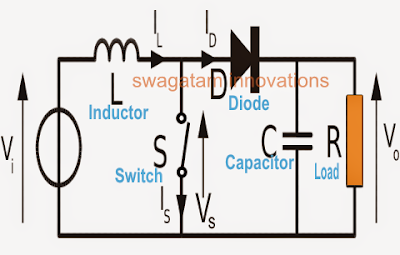
Преобразувателят на силова електроника
Знаем, че преобразувателят е приложение на силовата електроника, така че PID контролерът се използва най-вече в преобразувателите. Всеки път, когато даден преобразувател е свързан чрез система, базирана на промяната в рамките на товара, изходът на преобразувателя ще бъде променен. Например, инверторът е свързан с натоварването, огромният ток се подава, след като натоварванията се увеличат. По този начин параметърът на напрежението, както и токът, не е стабилен, но ще се промени в зависимост от изискването.
В това състояние този контролер ще генерира ШИМ сигнали за активиране на IGBT на инвертора. Въз основа на промяната в рамките на товара, сигналът за реакция се подава към PID контролера, така че той ще генерира n грешка. Тези сигнали се генерират въз основа на сигнала за повреда. В това състояние можем да получим променлив вход и изход чрез подобен инвертор.
Приложение на PID контролер: Управление със затворен контур за безчетков DC двигател
Взаимодействие на PID контролер
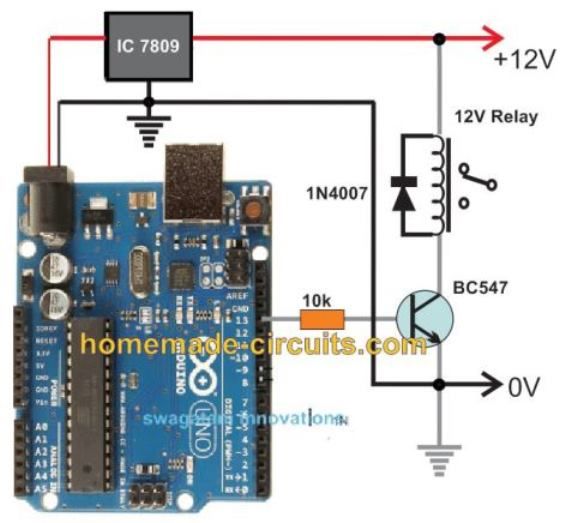
Проектирането и взаимодействието на PID контролера може да се извърши с помощта на микроконтролера Arduino. В лабораторията PID контролерът, базиран на Arduino, е проектиран с помощта на платката Arduino UNO, електронни компоненти, термоелектрически охладител, докато софтуерните езици за програмиране, използвани в тази система, са C или C ++. Тази система се използва за контрол на температурата в лабораторията.
Параметрите на PID за конкретен контролер се намират физически. Функцията на различни PID параметри може да бъде реализирана чрез последващия контраст между различни форми на контролери.
Тази система за свързване може ефективно да изчисли температурата чрез грешка от ± 0,6 ℃, докато постоянната температура се регулира само чрез малка разлика от предпочитаната стойност. Концепциите, използвани в тази система, ще предоставят както евтини, така и точни техники за управление на физическите параметри в предпочитан диапазон в лабораторията.
По този начин тази статия разглежда общ преглед на PID контролера, който включва история, блокова диаграма, структура, видове, работа, методи за настройка, взаимодействие, предимства и приложения. Надяваме се, че сме успели да предоставим основни, но точни познания за PID контролерите. Ето един прост въпрос за всички вас. Сред различните методи за настройка кой метод за предпочитане се използва за постигане на оптимална работа на PID контролера и защо?
От вас се изисква да дадете своите отговори в раздела за коментари по-долу.
Снимки Кредити
Блокова схема на PID контролера от wikimedia
Структура на PID контролера, P-контролер, P - реакция на контролера и PID контролер от blog.opticontrols
P - отговор на контролера от control.engin.umich
PI- отговор на контролера от м. яжте
Отговор на PID контролера от wikimedia
Маса на Зиглер-Никълс от control.engin
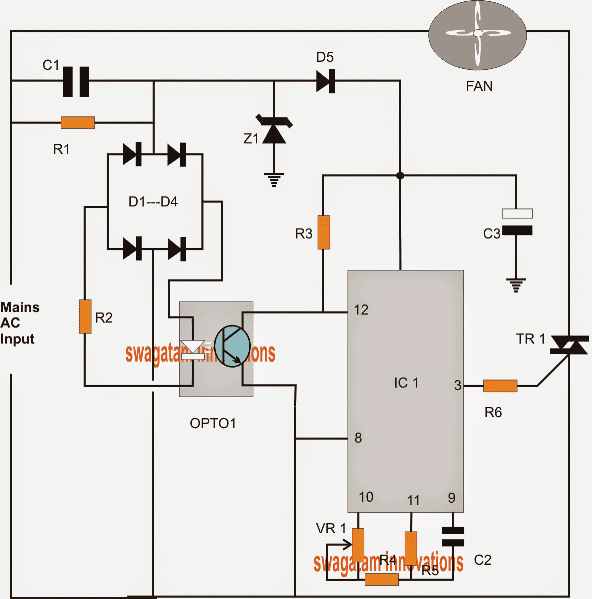
![Контролни светлини, вентилатор, с помощта на дистанционното управление на телевизора [Пълна електрическа схема]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)




{kind=link}
{kind=link}
{kind=link}
{kind=link}