В тази публикация ще обсъдим основите на сглобяването на корпуса на квадрокоптера с помощта на алуминиеви тръби и болтове, в по-късните раздели на статията ще обсъдим и по отношение на обикновена дронна верига, която би могла да се използва за управление на малък безпилотен възел, без да зависи от сложни микроконтролери.
Квадрокоптерът е може би най-простата летяща машина, изискваща минимално количество аеродинамична точност и усложнения, и затова не е изненада, може да спечели огромна популярност сред различните любители, които биха могли успешно да построят тази ... машина, която всъщност биха могли да летят и контрол по собствено желание.
Quadcopter Dynamics
Фактът, че дронът quadcopter е най-простият от гледна точка на техничност и динамика, всъщност се дължи на участието на 4 витла и балансирана структура на рамката, които позволяват на машината да лети с относително добро равновесие, дори при трудни климатични условия.
Но простотата също така предполага, че системата може да не е толкова ефективна, колкото конвенционалните модели самолети и хеликоптери, които са сложно проектирани да показват изключителна ефективност по отношение на скоростта и разхода на гориво и, разбира се, способността за натоварване ... всичко това може да бъде по същество липсва в типична система за квадрокоптер.
Въпреки това, що се отнася до хоби проект, тази машина се превръща в идеалния избор за повечето ентусиасти, които намират за много забавно и интригуващо да създадат своя собствена летяща машина у дома, която в крайна сметка 'слуша' и лети в каквато и посока потребителят предпочита да се движи.
Въпреки това, за нов играч, който може да е технически не толкова информиран, може да намери дори тази проста машина изключително сложна за разбиране, просто защото повечето от свързаната информация, представена в много уебсайтове, не успява да обсъди концепцията ясно и на „език“, който може да подхожда на неспециалист.
Тази статия е специално написана за не особено техничните хора, които се интересуват от изграждането на великолепна летяща машина, но намират темата за твърде трудна за смилане.
Защо Quadcopters са толкова лесни за изграждане днес
Замисляли ли сте се защо квадрокоптерите и дроновете са толкова лесни за конструиране в днешния свят и може би по-рано е било невъзможно да се използва електричество?
Това се дължи основно на развитието и усъвършенстването на литиево-йонните батерии. Това са изключително ефективни форми на батерии, предлагани днес, които предлагат впечатляващо съотношение мощност / тегло. Наред с това, изобретението на BLDC двигатели и високо рафинирани двигатели с постоянен магнит също допринесоха за лесното конструиране на безпилотните самолети.
Li-Ion батерията е в състояние да осигури страхотно количество въртящ момент на двигателите, което става достатъчно, за да избута квадрокоптера на голяма надморска височина за секунди, а също така му позволява да остане във въздуха за дълъг период от време изпълнението е много ефективно и полезно.
Как лети Quadcopter
Сега нека да скочим правилно и да разберем кои са основните неща, необходими за успешното летене на квадрокоптер. Ето основите, за да накарате машината да лети гладко:


1) По принцип машината изисква твърдо и здраво тяло, но изключително леко тегло. Това може да бъде произведено или сглобено с помощта на кухи квадратни алуминиеви екструзионни тръби, чрез подходящо пробиване на отвори и фиксиране на рамката с гайки и болтове.
2) Конструкцията трябва да бъде под формата на перфектен „+“ или перфектен „x“, това не прави разлика, стига ъгълът между „пресичащите“ тръби да е 90 градуса всяка.

Основните елементи, необходими за изграждането на квадрокоптер, могат да се видят на следното изображение:

Симулация на сглобяване на части
Грубата анимирана симулация по-долу показва как да се съберат горепосочените елементи заедно:

Как да изградим Quadcopter Framework
Алуминият за рамката „+“ може да бъде получен чрез подходящо изрязване и оразмеряване на готови алуминиеви екструзионни тръби, както е показано по-долу:

Размерът на рамката е относителен и следователно не е от решаващо значение, можете да изградите широка рамка с мотори, разположени широко раздалечени или да изградите доста компактна рамкова структура, където двигателите не са твърде раздалечени ... въпреки че трябва да се гарантира, че витлата са отдалечени един от друг, за да позволят по-добро равновесие и баланс.
3) Структурата на рамката „+“ трябва да бъде снабдена с квадратна платформа в централната секция, където раменните рамена се срещат и пресичат помежду си. Това може да бъде просто добре полирана алуминиева плоча, подходящо оразмерена за удобно настаняване на цялата необходима електроника и окабеляване.
По този начин тази централна плоча или платформата е основно необходима за инсталиране и настаняване на електрониката на системата, която в крайна сметка ще бъде отговорна за управлението на вашия квадрокоптер.
4) След като горната рамка е завършена, двигателите трябва да бъдат фиксирани в краищата на напречните пръти, както е показано на горните фигури.
5) Излишно е да казваме, че всички монтажни работи трябва да бъдат извършени с изключителна точност и перфектно подравняване, това може да изисква асоциация на опитен производител за работата.
Тъй като всичко в дизайна е по двойки, точното подравняване на елементите всъщност няма да бъде твърде трудно, става въпрос само за оразмеряване и монтиране на двойките с възможно най-много сходство, което от своя страна ще осигури максимално ниво на баланс, равновесие и синхронизация за системата.
След като рамката е изградена, е време да интегрирате електронните вериги със съответните двигатели. Това ще трябва да се направи съгласно инструкциите, предоставени в даденото ръководство за веригата.
Платките могат да бъдат монтирани от долната страна на централната плоча с подходящ корпус или над плочата, отново с подходящ шкаф за плътно затваряне.

Разбиране на посоката на въртене на витлата
Анализирайки посоката на въртене на моторните витла за балансирано повдигане:
Позовавайки се на горната анимирана симулация, посоката на въртене на моторните витла трябва да бъде подравнена по следния начин:
Просто трябва да бъде такова, че двигателите в краищата на единия прът да са еднакви, но различни от посоката на двигателя на другия прът, което означава, че ако един прът има двигателите, въртящи се по посока на часовниковата стрелка, тогава двигателите в краищата на другия допълващ прът трябва да бъде настроен да се върти в посока, обратна на часовниковата стрелка. посока.
Моля, обърнете се към симулацията по-горе, за да разберете правилно противодействащото движение на двигателите, което може да е необходимо, за да се присвои на двигателите, за да се осигури балансиран прием на
Как да контролирате посоката на квадрокоптера, като контролирате скоростта на двигателите.
Да, посоката на летене на квадрокоптера може да бъде променена и контролирана според вашето собствено желание и желание чрез просто прилагане на различни скорости (RPM) към съответните двигатели.
Следващите изображения показват как основната скорост на предаване може да се приложи към съответните двигатели, за да се постигне и изпълни всяка желана посока на летене към машината:




Както е посочено в горните диаграми, чрез подходящо намаляване на скоростта на набор от двигатели, или увеличаване на скоростта на противоположния комплект двигатели, или коригиране на скоростите според собствените си предпочитания, квадрокоптерът може да бъде направен да пътува във въздуха във всеки желана конкретна посока.
Горните изображения показват основните посоки, като напред, назад, надясно, наляво и т.н. ... обаче всяка друга странна посока може също да бъде ефективно приложена чрез подходящо регулиране на скоростите на съответните двигатели или може да бъде само един двигател.
Например, за да принуди машината да лети в посока N / W, може да се увеличи скоростта само на S / E двигателя, а за да може машината да лети в посока N / E, скоростта на S / Моторът W може да бъде увеличен ... и така нататък. Просто трябва да се практикува, докато пълният контрол на квадрокоптера стане постижим и овладян от потребителя.
Проектиране на практически квадрокоптер
Досега научихме за основната конструкция на корпуса на дрона и хардуера, сега нека се научим как да направим квадрокоптер или дронна верига бързо и евтино, използвайки съвсем обикновени компоненти. В една от по-ранните ми публикации научихме как да направим относително сложна и следователно ефективна летателна машина с квадрокоптер, без да използваме микроконтролер, за повече информация бихте искали да преминете през следните публикации:
Схема на дистанционно управление без MCU | Електронна схема
В настоящата статия се опитваме да направим горния дизайн много по-опростен, като елиминираме безчетковите двигатели и го заменим с двигатели с четка, и следователно правим възможно да се отървем от комплекса BLDC модул на веригата на драйвера .
Тъй като подробностите за механичната конструкция на квадрокоптера вече са обсъдени по-горе изчерпателно, ние ще се справим само с раздела за проектиране на веригата и ще научим как той може да бъде изграден за летене на предложената най-проста схема на безпилотен самолет.
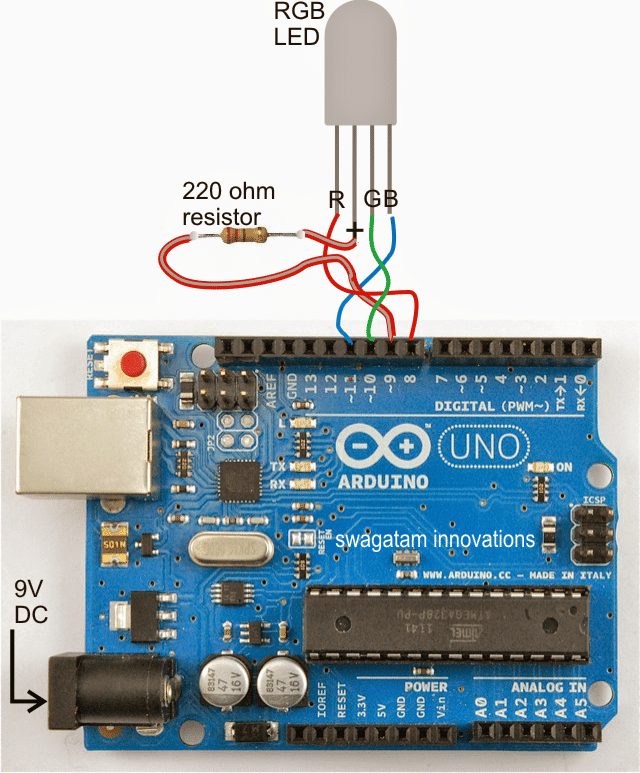
Както бе споменато по-рано, този опростен квадрокоптер изисква само основните RF модули за дистанционно управление, както е показано на примерното изображение по-долу:

Ще трябва купувайте тези RF модули от всеки онлайн магазин или от местния електронен дилър на резервни части:
Освен гореспоменатото RF дистанционни модули Ще бъдат необходими и 4 мотори с четка с постоянен магнит, което всъщност формира сърцето на машината за дрон. Може да бъде както е посочено в следващото изображение с дадените описания, или каквото и да е друго подобно според изискваните потребителски спецификации:

Електрически спецификации на двигателя:
- 6V = работно напрежение (пик 12V)
- 200mA = работен ток
- 10 000 = RPM
Списък с части
- 1K, 10K 1/4 вата = 1 всеки
- 1uF / 25V кондензатор = 1не
- Предварително зададени 10K или 5K = 1не
- Rx = 5 вата резистор с тел, стойността се потвърждава с експерименти.
- IC 555 = 1не
- 1N4148 Диоди = 2nos
- IRF9540 Mosfet = 1не
- 6V двигател с четка тип = 4nos
- Гъвкави проводници, спойка, поток и др.
- ПХБ с общо предназначение за сглобяване на горните части
- 4-канален RF модул за дистанционно управление, както е показано на съответните изображения.
- Алуминиеви канали, винтове, гайки, плочи и др., Както е обяснено в статията.
- Батерия, както е показано по-долу:

Как да конфигурирам приемника за дистанционно управление с двигателите
Преди да разберете как да конфигурирате приемника на дистанционното управление с двигателите на квадрокоптера, би било важно да научите как скоростите на двигателя трябва да бъдат регулирани или подравнени за генериране на необходимите движения наляво, надясно, напред, назад.
Първоначално има два начина за придвижване на квадрокоптер, които са в режимите „+“ и „x“. В нашия дизайн ние използваме основния '+' режим на движение за нашия безпилотен самолет, както е показано на следната диаграма:

Позовавайки се на горната диаграма, ние осъзнаваме, че просто трябва да увеличим подходящо скоростите на съответните двигатели за изпълнение на желаните маневри за насочване на безпилотния самолет.
Това увеличаване на скоростите може да бъде наложено чрез конфигуриране на релетата на дистанционното управление съгласно следната електрическа схема. На диаграмата по-долу можем да видим IC 555 PWM верига свързан с 4-те релета на модула на приемника за дистанционно управление на 6-те релета (1 реле е неизползвано и може просто да бъде премахнато, за да образова пространството и теглото).
Регулиране на ШИМ
Както може да се види на диаграмата, захранването с ШИМ е свързано с всички N / C контакти на релетата, което предполага, че обикновено квадрокоптерът ще се движи през този равномерен и равен ШИМ захранване, чийто работен цикъл може първоначално да бъде регулиран така, че квадрокоптерът е в състояние да постигне точно определено количество тяга и височина.
Това може да бъде експериментирано чрез подходящо регулиране на показания ШИМ пот.
Как да конфигурирам релейните контакти
N / O контактите на релетата могат да се видят свързани директно с положително захранване, така че всеки път, когато се натисне съответния бутон на дистанционната слушалка на предавателя, съответното реле се активира в модула на приемника, което от своя страна позволява на съответния двигател да получи пълното 12V захранване от батерията.
Горната операция позволява на активирания двигател да набира по-голяма скорост от останалите двигатели, което позволява на квадрокоптера да се движи към посочената посока.
Веднага след като дистанционният бутон бъде освободен, дронът спира мигновено и продължава да витае в постоянен режим.
По същия начин, други насочени движения могат просто да бъдат постигнати чрез натискане на другите зададени бутони на отдалечената слушалка.
Най-горното реле е за осигуряване на безопасно кацане на машината, това се прави чрез добавяне на текущо падащ резистор последователно с N / O контакта на показаното реле.
Тази стойност на резистора трябва да се изчисли с някои експерименти, така че квадрокоптерът да се движи около няколко фута над земята, когато този резистор се превключва през прикрепеното реле.
Електрическа схема

Показаните релета са частта от приемника на радиочестотния модул, чиито контакти първоначално са несвързани (по подразбиране празни) и трябва да бъдат свързани, както е посочено в горната схема.
Предполага се, че радиочестотният приемник е инсталиран вътре в квадрокоптера и неговите релета са свързани със съответните двигатели и батерия, както е показано по-горе.
Можете да видите няколко конектора (в зелен цвят), които ненужно могат да добавят тежест върху дрона. Можете да ги премахнете всички, за да намалите теглото, и да свържете съответните проводници директно към печатната платка чрез запояване.
Как се движи дронът:
Както е обяснено в горната дискусия, когато се натисне определен дистанционен бутон, той задейства съответното реле на модула на квадрокоптера, което кара съответния двигател да се движи по-бързо.
Тази операция от своя страна принуждава машината да се движи в посока, противоположна на двигателя, който се превключва да се върти при по-бързи обороти в минута.
Така например, увеличаването на скоростта на южния двигател кара машината да се движи на север, увеличаването на северния двигател я кара да се движи на юг, подобно увеличаването на източното скорост на двигателя я кара да се движи на запад и обратно.
Интересното е, че увеличаването на двигателите юг / изток дава възможност на квадрокоптера да се движи към противоположния север / запад, който е в режим на диагонал .... и така нататък.
Плюсове и минуси на обяснените по-горе прости вериги за дистанционно управление на Qaudcopter.
Професионалисти
- Евтино и лесно за изграждане дори от сравнително нов любител.
- Не изисква сложни операции с джойстик.
- Може да се управлява с помощта на единичен 6-канален модул за дистанционно управление
Минуси
- По-малко ефективен по отношение на резервно копие на батерията поради участието на двигатели с четка
- Посочената скорост е постоянна и не може да се променя чрез дистанционното управление
- Маневрирането може да не е плавно, а малко по-рязко, докато превключвате бутоните.
Предишен: Обяснен резистор за усещане на сила Следващ: Капацитивен делител на напрежението