
При изчисленията CAN интерфейсът може да бъде споделена граница в двете отделни части на информация за системния разговор. Разговорът може да се извърши между компютърен хардуер, софтуер, хора, периферни устройства и комбинации от тях. Някои хардуерни устройства на компютър харесват сензорен екран, защото сензорен екран може да споделя и получава информация чрез интерфейса, докато други устройства като микрофон, мишката са само по един начин. Интерфейсите са предимно в два типа като хардуерно и софтуерно взаимодействие. Хардуерните интерфейси се използват в много от устройствата като входни, изходни устройства, шини и устройства за съхранение. Този CAN интерфейс може да бъде дефиниран от логическите сигнали. Софтуерен интерфейс може да бъде на разположение в широк диапазон на различни нива. OS може да има интерфейс с различни части на хардуера. Програмите или приложенията на Може да се наложи ОС да комуникира чрез потоци и в обектно ориентирано програмиране обектите във всяко приложение трябва да комуникират чрез методи.

МОЖЕ АВТОБУС
Шината CAN е разработена през 1983 г. в Robert Bosch GmbH. Този протокол е издаден през 1986 г. на конгреса на SAE (Общество на автомобилните инженери) в Детройт, Мичиган. Първият CAN протокол е произведен от Philips и Intel и пуснат на пазара през 1987 г. Но BMW серия-8 е първото превозно средство, което разполага с мултиплексна система за окабеляване, базирана на протокол CAN.

МОЖЕ АВТОБУС
Пълната форма на CAN е мрежа на контролер . Това е един вид автобус за превозни средства, предназначен главно за различни устройства и микроконтролери да взаимодействат помежду си без хост компютър. Този протокол се основава на съобщение и е предназначен главно за електрическо окабеляване в автомобили. Bosch публикува различни версии на CAN и през 1991 г. беше публикувана последната CAN 2.0.
CAN се състои от две части, главно като част А и част Б, където част А е 11-битов идентификатор и е в стандартен формат. Част Б е 29-битов идентификатор и е в разширен формат. CAN, който използва 11-битови идентификатори, се нарича AN 2.0A, а CAN, който използва 29-битови идентификатори, се нарича CAN 2.0B
Взаимодействие на CAN с USB
Взаимодействието на CAN с USB е просто устройство, използвано за наблюдение на CAN шината. Това устройство използва микропроцесор NUC140LC1CN 32 K Cortexes-M0. Той има както CAN, така и USB периферни устройства.
Основните характеристики на свързването на CAN към USB са
- Проектирането е много лесно
- Добре съвпадащи с протокола LAWICEL CANUSB
- Излагайки се като устройство като FTDI USB
- Той поддържа CAN 2.0B 29-битови и CAN 2.0A 11-битови кадри
- Състои се от вътрешен буфер за съобщения (FIFO CAN)
- Той се захранва от USB порт
- За актуализации на фърмуера се използва устройство за масово съхранение (USB, пребиваващо във Flash)
Схематична диаграма
Конфигурацията на веригата на взаимодействието на CAN с USB е показана по-долу. CAN трансформатор се използва, за да позволи на NUC140 CAN устройството да взаимодейства с CAN шината. Чипът TJA1051T решава целта от NXP. Микропроцесорът NUC140 може да работи с 5V захранване, няма нужда от допълнителен регулатор на напрежение 3.3V. Тази удобна подредба прави лесна задача, прилагаща CAN към USB интерфейс.

Схематична диаграма
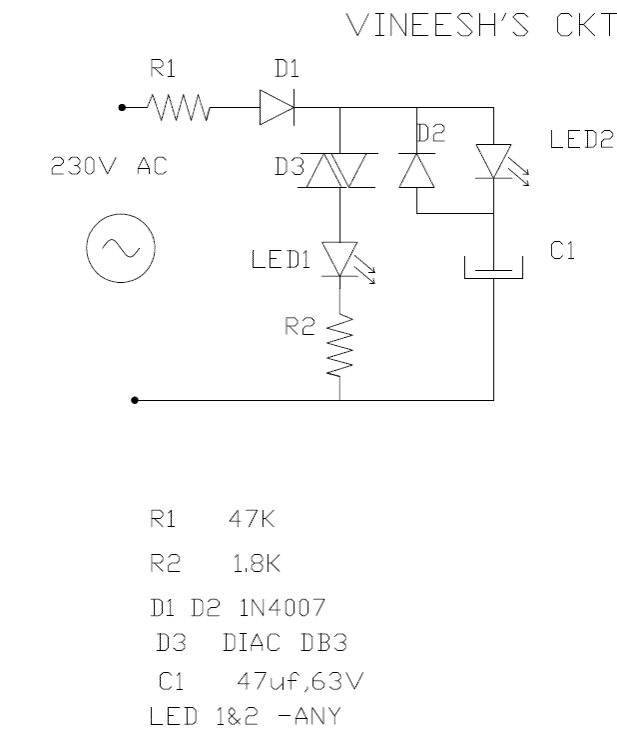
Веригата е изградена с три светодиода за състоянието, а именно D1, D2 и D3.
- Тук състоянието на диода D1 казва, че USB е свързан към хоста
- Тук състоянието на D2 диода казва, че активността на CAN шината
- Грешките на CAN шината могат да бъдат посочени от D3 диод
Микропроцесорът NUC140 няма вграден зареждащ механизъм и най-добрият начин за програмиране е само използваният Nuvoton ICP програмист и РЪКА SWD (Serial Wire Debug) интерфейс. Ако устройството за зареждане е заредено преди това с програма, то може да бъде задействано. Свързването на JP1 преди включване на интерфейса ще задейства зареждащото устройство.
Boot Loader
Флаш паметта на микропроцесора NUC140LC1 е разделена на две секции. Те изпълняват кода на потребителската програма и зареждащия файл. Размерът на boot loader и изпълняващата се потребителска програма е 4K и 32K. Тук устройството за зареждане на устройство за масово съхранение (MSD) от Nuvoton се използва за изграждане на напълно функционален USB boot loader. Зареждащото устройство ще се активира чрез свързване на джъмпер JP1. И накрая, сменяемо устройство трябва да се вижда във файловата система на хоста с размер 32KB. Просто копирайте и поставете актуализацията на CAN към USB фърмуер на устройството за зареждане на зареждащия файл. Изключете USB кабела, изключете джъмпера и го включете отново. Сега трябва да работи актуализацията на новия фърмуер.

Boot Loader
CAN към USB интерфейсно програмиране и NuTiny-SDK-140
Програмиране на микропроцесор NUC140 се нуждае от приложение за програмиране Nuvoton ICP и Nu-Link програмист на Nuvoton. Но тук NuTiny-SDK-140 (демонстрационната платка NUC140) се предлага от Digi-Key. Състои се от две части като Nu-Link програмисти и частта с чип NUC140. Тази платка е дори перфорирана, за да отдели частта от Nu-Link. Всъщност можете да проектирате това устройство изключително около демонстрационната платка NUC140, единственият допълнителен CAN приемо-предавателен чип ще бъде от съществено значение.

NUC140 дъска
По този начин това е всичко за CAN интерфейс с USB включва, CAN шина, свързване CAN към USB, схематична диаграма, зареждащо устройство и микропроцесор NUC140. Надяваме се, че сте разбрали по-добре тази концепция. Освен това, при всякакви въпроси относно тази статия, моля, дайте ценните си предложения, като коментирате в раздела за коментари по-долу. Ето въпрос към вас, какви са приложенията на CAN интерфейса?
Кредити за снимки:
- CAN към USB интерфейс saelig
- МОЖЕ АВТОБУС canbuskit
- NUC140 инструкции



![Контролни светлини, вентилатор, с помощта на дистанционното управление на телевизора [Пълна електрическа схема]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)


{kind=link}
{kind=link}
{kind=link}