В този пост ние изследваме какво е BLDC мотор и впоследствие научаваме по отношение на дизайна на безсензорна схема на драйвер на BLDC мотор.
BLDC вентилатори на процесора
Видяхте ли тези бързо движещи се вентилатори в процесори, стабилизатори на напрежение, DVD плейъри и друго подобно оборудване, които работят с изключителна ефективност, консумирайки минимално пространство, ток и въпреки това са в състояние да изпълняват важните операции, както е предвидено за конкретното оборудване?
Да, това са всички модерни версии на BLDC вентилатори или безчеткови постояннотокови двигатели, които са много по-добри от старите традиционни четки двигатели.

С любезното съдействие: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Въпреки това BLDC двигателят ще изисква усъвършенствана схема на драйвера и да, всички тези вентилатори на процесора съдържат вградени модули на драйвери, въпреки че изглеждат лесно работещи с помощта на обикновен DC, вътрешно системата вече е снабдена с интелигентна схема.
BLDC двигател
Тук ще научим за една такава интелигентна схема на драйвер за BLDC двигател, използвайки един чип DRV10963 за задвижване на всеки малък BLDC мотор с невероятна ефективност, а по-късно в една от предстоящите статии ще видим как тази схема на интегрална схема може да бъде надградена за шофиране дори мощните BLDC с голям ток като тези, които са използва се в квадрокоптери.
Но преди това би било интересно да научите малко за BLDC двигателите.
Разлика между четки и безчеткови постояннотокови двигатели
Разликата между двигател с четка и безчетков двигател и степента на ефективност е доста очевидна.
Тъй като двигателите с четка имат навита арматура, която се движи между магнитите, трябва да използва 'четки' (триещи се контакти), така че подвижните клеми на намотката да могат да приемат постоянно захранващото напрежение, без да се налага сами да достигат до източника на захранване, което в противен случай би направило работа невъзможна и застрашава операциите.
В безчетков двигател намотката или намотката никога не се движат и са постоянни, тук роторът носи набор от постоянни магнити и се върти под влиянието на магнитните потоци на заобикалящата намотка.
Тъй като магнитът е свободен от всички неприятности и е в състояние да работи, без да включва терминали за управление или за получаване на мощност, той може да се движи без усилие, въртейки се с бърза скорост и практически на безшумно ниво.
Но тук има уловка. За да накара електромагнитът да реагира на потоците на постоянен магнит, трябва да има постоянно изместване на магнитната фаза или полюсите, така че двамата колеги да могат постоянно да реагират и да преминават през противоположна сила, като по този начин освобождават необходимата торсионна сила над ротор и изпълнете въртенето с получения въртящ момент.
В двигател с четка това става по-лесно поради саморегулиращия се характер на намотката на котвата, която може да се върти и да създава самоподдържаща се противоположна магнитна сила и да се върти, без да е необходим външен импулс или обработка.
Въпреки това в BLDC това се превръща в проблем, тъй като роторът на магнита остава „безразсъден“ и изисква изчислена магнитна команда от намотката, за да се върти по смислен начин, а не по случаен начин.
Точно затова всички BLDC двигатели задължително изискват верига на двигател за управление на трите отделни комплекта намотки вътре в двигателя.
По този начин всички BLDC са по същество 3-фазни двигатели и задължително изискват 3 фази за генериране на въртящия момент на ротора.
Какво правят безсензорните BLDC драйвери
Схемата на BLDC без сензор просто електрифицира последователно 3-те намотки, така че магнитният ротор да може да премине през постоянна противоположна сила, позволяваща на двигателя да постигне постоянен въртящ момент и въртяща сила.
Но това последователно захранване на намотката BLDC от веригата не може да бъде зададено само на случаен принцип, то трябва да бъде в тандем или в отговор на положението на въртене на роторния магнит, в противен случай изпълнението може да се обърка и да станем свидетели на вала на двигателя (ротор ) върти се безразборно, което се върти между часовниковата стрелка и обратно на часовниковата стрелка без разумно завъртане.
Защо сензорите се използват в BLDC двигатели
Следователно, ние представяме сензори, разположени в много варианти на BLDC двигатели, тези сензори (обикновено сензори за ефект на Хол) „разбират“ променящото се положение на магнитните полюси на роторния магнит, инструктират прикрепената верига на процесора да електрифицират съответната намотка и да извършат въртеливо движение с оптимален въртящ момент.
Датчиците на Hall ефект ефективно се използват в повечето BLDC двигатели, които са с относително по-големи размери, но за по-малки двигатели, като например в CPU вентилатори, CPU устройства, DVD плейъри, в малки изпускателни вентилатори, за двигатели, използвани в квадрокоптери, сензорите за Hall ефект могат да станат неподходящи и следователно се прилага алтернативен подход без сензор.
Това включва експлоатация на присъщото на намотката задно ЕМП електричество, което се приема като референтен източник за обработка и електрифициране на съответните комплекти намотки и изпълнение на въртящия момент.

Симулиране на движение на ротора на BLDC
В горната сирова симулация можем да визуализираме как освободената обратно ЕМП се приема за референтна и се използва за генериране на последователни импулси за следващите набори на навиване, налагайки въртящ момент на централния ротор с постоянен магнит. Симулацията може да не е точното възпроизвеждане, въпреки това дава груба представа за принципа на работа.
Интересно е да се отбележи, че импулсът се превключва, когато N / S на магнита е точно в центъра на сърцевината на намотката, което позволява на намотката да се активира като N или S в зависимост от полярността на импулса и да предизвика привличане и отблъскване сила върху N / S магнитите, като по този начин генерира необходимия въртящ момент на максимално възможното ниво.
И това от своя страна става възможно благодарение на задната ЕМП, освободена чрез превключване на предишната намотка.
Горната дискусия изяснява работата на датчик без BLDC двигател, сега нека научим как определена схема се справя с горното сложно изпълнение на 3-фазно превключване
BLDC драйвер DRV10963
След малко търсене намерих тази безсензорна схема на драйвера BLDC, използвайки един чип DRV10963, който използва незначително количество части в конфигурацията и въпреки това е в състояние да внедри усъвършенствана обработка за предвидените действия.
DRV10963 е най-съвременен чип, който е специално проектиран да управлява BLDC двигатели без сензор, като просто изпреварва обратната ЕМП от намотката на двигателя и доставя точна команда върху намотката и постига оптимален въртящ момент над ротора.
Електрическа схема

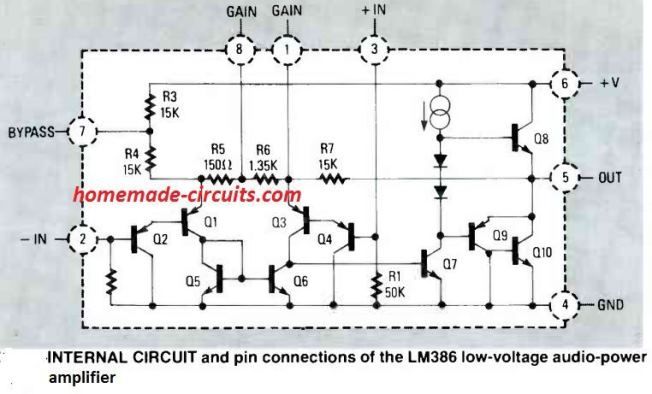
Горното изображение показва простото оформление на веригата, което очевидно не включва нищо друго освен самата интегрална схема.
Различните изводи се разпределят за извършване на определените функции като PWM контрол на скоростта на двигателя, управление на посоката и т.н. чрез просто подаване на съответните изводи с посочените данни от външен източник.
Следващото изображение показва пакета на чипа, който изглежда като 10-пинов DIL IC, различните функции на пиновете на същия могат да бъдат проучени от данните, предоставени под диаграмата:

Позовавайки се на електрическата схема на предложената безсензорна схема на драйвер BLDC както е представено в предишната статия, а също и изображението на чипа по-горе, подробностите за пиновете могат да се разберат по следния начин:
Подробности за IC Pinout
FG = Това е щифтът за индикатор на скоростта на двигателя (изход), който е монтиран в режим на отворен колектор с вътрешен BJT.
Отворен колектор означава, че изходът на този извод ще произведе отрицателните ШИМ чрез потъващи логики през отворения колектор и земята, като по този начин, за да получи валидно отчитане, потребителят ще трябва да свърже издърпващ резистор през този отворен колектор и положителното захранване (5V ) за изпълнение на индикацията за скоростта при този пиноут.
FGS = Това е входът за избор на индикатора на скоростта, което означава, че тук може да се въведе логика за високо или ниско за включване / изключване на индикаторния щифт FG.
Vcc = Положителното захранване на интегралната схема, за да може тя да работи, не трябва да надвишава 5V.
W, U и V са трифазните изходи за BLDC мотора, който трябва да работи чрез този IC. Това също действа като входове за отчитане на импулсите на ЕМП на двигателя за необходимото синхронизирано превключване на намотките на двигателя.
GND = Отнася се за отрицателното захранване на интегралната схема по отношение на Vdd щифта.
FR = Помага за избор или командване на посоката на двигателя и може да се променя динамично по всяко време, след като системата се захрани, просто чрез въвеждане на външна логика висока или логика ниска.
PWM = Това означава PWM контролен вход от външен генератор на PWM форма на вълната.
Този ШИМ вход може да е променлив за осъществяване на желания контрол на скоростта на свързания BLDC мотор.
Пунктираното пространство в центъра на чипа показва термичната подложка, която може да бъде затегната или натисната с радиатор, за да потъне евентуалното генериране на топлина върху чипа, докато се използва с натоварен BLDC мотор.
Горната дискусия посочва пиновете или подробностите за връзката на безсензорния BLDC чип на драйвер за мотор DRV10963, сега нека анализираме подробно вътрешната конфигурация и функционирането на чипа с помощта на следните точки:
Описание на устройството
DRV10963 е 3-фазен безсензорен електродвигател с вградени мощни MOSFET (3-фазен H-мост). Той е съобразен с по-висока производителност, намален шум и минимални функции на моторното задвижване на броя на вторичните материали. Ексклузивната безсензорна схема за управление на синусоидален прозорец Iess 180 ° осигурява безшумна ефективност на пътуването до двигателя.
DRV10963, съставен от функционалност за интелигентно заключване, заедно с допълнителни вградени схеми за сигурност, за да постигне осигурена производителност. DRV10963 може да се намери в термично ефективна 10-пинова USON опаковка с непокрита термична подложка.
Как работи IC
Продуктът DRV10963 е трифазен безсензорен моторни оператор с MOSFET с вливаща мощност
създаден специално за превъзходна производителност, намален резонанс и минимален брой повърхностни функции на моторното задвижване.
Основният синусоидален план за управление без прозорци без прозорци на 180 ° представя безшумно функциониране на двигателя, като поддържа номинално пулсация на електрически стимулиран въртящ момент. При инициализация устройството DRV10963 ще завърти двигателя в хода, посочен през входния щифт FR.
Чипът DRV10963 ще функционира с трифазен BLDC мотор, използвайки синусоидален план за управление.
Значението на използваните синусоидални фазови напрежения зависи от работния цикъл на ШИМ щифта. Докато двигателят се движи, DRV10963 IC предоставя данни за скоростта на щифта FG.
Устройството DRV10963 се състои от способност за интелигентно заключване. В случай, подобен на този, при който двигателят е спрян от външно налягане, програмата ще идентифицира проблема с блокирането и ще предприеме мерки, за да се предпази самостоятелно заедно с двигателя.
Конкретната процедура на веригата за заключване е подробно описана в Lock Detection. Освен това DRV10963 IC включва множество вградени вериги за безопасност, например срещу защита от ток, защита срещу напрежение, защита от напрежение и защита от температура.
Характерно обяснение
Въвеждане и контрол на скоростта
DRV10963 представя 3-фазни PWM изходи с 25 kl-lz, които могат да имат стандартен процент на синусоидални форми на вълната от фаза до фаза. В случай че се определи някакъв цикъл по отношение на земята, засичаната форма на вълната вероятно ще бъде защитена с ШИМ синусоида, комбинирана с хармоници от 3-ти ред, както е показано на фигура 2.

Тази стратегия за кодиране рационализира спецификациите на драйвера поради причината, че вероятно често има еднофазен изход, който може да бъде наравно с нулата.
Амплитудата на резултата варира в зависимост от захранващото напрежение (VCC) и задължителния работен цикъл на ШИМ (ШИМ), както е дефиниран в уравнение 1 и подчертан на фигура 3. Оптималната амплитуда се прилага, след като указаният работен цикъл на ШИМ е 100 ПРОЦЕНТА.
Vphpk = PWMdc>

Скоростта на двигателя се регулира не директно чрез използването на ШИМ, за да се регулира амплитудата на фазовите напрежения, които се използват за двигателя.
Работният цикъл на ШИМ входа се модифицира в 9-битова цифрова величина (от 0 до 511).
Резолюцията на регулирането е 1/512 == 0,2%. Анализаторът на работния цикъл улеснява първоначалната операция за обмен на поръчки между входния работен цикъл и 9-битовата цифрова цифра.
Това е подчертано на фигура 4, в която r = 80 ms.

Ефективността на обмяната между PWM наредения работен цикъл заедно с изходната максимална амплитуда е променлива в устройството DRV10963.
Максималната амплитуда на резултата се обсъжда от уравнение 1, когато командата PWM> минимален функциониращ работен цикъл. Най-ниският работен цикъл на работа често се установява до евентуално 13%, 10%, 5% или никакво ограничение чрез настройка OTP (MINOP_DC1: 0).
Таблица 1 показва препоръчаните конфигурации за минималния работен цикъл на работа.
Винаги, когато PWM инструктираният работен цикъл е по-малък от най-ниско функциониращия работен цикъл и над 1,5%, изходът ще се регулира при минималния работен цикъл на работа. Всеки път, когато входният работен цикъл е под 1,5%, устройството DRV10963 вероятно няма да стартира изхода и се изпраща в режим на готовност.
Това може да бъде илюстрирано на фигура 6.

Ротационни конфигурации
DRV10963 ще стартира двигателя чрез техника, която е подробно описана на фигура 7.

Графиката за инициализация на двигателя се състои от конфигурируеми на устройството алтернативи за отворен контур за ограничаване на превключване на затворен контур (HOW.), Време за подравняване (TAHQH) и скорост на ускорение (RACE).
За да подреди ротора към комутационната логика, DRV10963 изпълнява х%% работен цикъл на фази V и W едновременно контролирайки фаза U при GND.
Този сценарий се поддържа за секунди TAIign. Значимостта x% се идентифицира от напрежението на VCC (както е показано в таблица 2), за да се запази достатъчен въртящ момент при различни различни захранващи напрежения.
С постигането на последователността на подравняването двигателят е принуден да се ускори чрез поставяне на синусоидални фазови напрежения с пикови нива, както е илюстрирано в таблица 2, и усилване посредством обхвата на комутация с разширяваща се скорост, представена от RACE, докато нивото на комутация нараства до Hom ., Hz.
Веднага щом се достигне тази граница, DRV’l0963 се превръща в режим на затворен цикъл, при което прогресията на комутационното задвижване се разпознава от вградения алгоритъм за управление, докато използваното напрежение се идентифицира от входа на задължителния работен цикъл на PWM.
Отвореният контур за затваряне на границата за превключване на цикъла (Hom), времето за подравняване (TAHQH) и скоростта на ускоряване (RACE) могат да се конфигурират чрез OTP конфигурации.
Изборът на праг за предаване (КАК,) обикновено се одобрява чрез оценка на пробите и грешките. Целта би била да се предпочете допустимото отклонение, което би могло да бъде възможно най-малко и дава възможност на двигателя без усилие и вярно да превключва между ускорението на отворения контур и ускорението на затворения контур.
Обикновено двигателите с повишена скорост (максимална скорост) изискват превъзходен толеранс на предаване, поради факта, че двигателите с повишена скорост включват намалена Kt и следователно по-достъпна BEMF.
Таблица 3 демонстрира конфигурируемите предпочитания за толеранса на предаването. Най-високите скорости в електрически Hz са доказани като еталон за помощ при избора на желаната скорост на предаване за конкретно подаване.

Изборът на време за подравняване (TAHQH) и скорост на ускоряване (RACE) може дори да зависи от изследването на проби и грешки.
Двигателите с по-голяма инерция обикновено изискват удължено време за подравняване и по-бавна скорост на ускоряване, за разлика от двигателите с ниска инерция, които обикновено изискват по-кратко време за подравняване, заедно с по-бързо ускорение. Програмните компромиси трябва да бъдат приложени, за да се извлече полза от стабилността на старта, вместо да се върти нагоре.
TI одобрява, като се започне с вземане на решение за по-малко интензивни конфигурации (по-бавна RACE и значителна Tmign), за да се компрометира времето за въртящ момент в подкрепа на максималната степен на изпълнение.
Веднага след като оборудването бъде потвърдено за добросъвестно изпълнение, допълнителните силови конфигурации (по-голям RACC и по-малък TAHQH) могат да бъдат използвани за намаляване на момента на включване и в същото време внимателно проследяване на степента на изпълнение.
Таблица 4 показва конфигурируемите настройки за TA'g ,, и RACE.

Останалата част от обяснението относно тази безсензорна BLDC IC е предоставена в този оригинален лист с данни
Моля, не се колебайте да коментирате, за да научите повече относно обсъдените по-горе подробности за схемата на драйвера на безсензорния BLDC двигател
Предишна: 12V LED раница за захранване Напред: Дистанционно управление Quadcopter без MCU