В тази публикация обсъждаме създаването на обикновена верига на регулатора на скоростта на 3-фазния асинхронен двигател, която може да се приложи и за еднофазен асинхронен двигател или буквално за всякакъв тип променлив двигател.
Когато става въпрос за управление на скоростта на асинхронните двигатели , обикновено се използват матрични преобразуватели, включващи много сложни етапи като LC филтри, двупосочни масиви от превключватели (използващи IGBT) и т.н.
Всички те се използват за постигане в крайна сметка на нарязан променлив сигнал, чийто работен цикъл може да се регулира с помощта на сложна верига на микроконтролера, като накрая осигурява необходимия контрол на скоростта на двигателя.
Въпреки това можем да експериментираме и да се опитаме да постигнем 3-фазен контрол на скоростта на асинхронния двигател чрез много по-опростена концепция, като използваме усъвършенстваните интегрални схеми за оптосъединители на детектора за пресичане на нула, триак и PWM верига.
Използване на детектор за нулево преминаване Opto Coupler
Благодарение на серията оптодвойки MOC, която направи веригите за управление на триак изключително безопасни и лесни за конфигуриране и позволяват безпроблемна интеграция на ШИМ за предвидените контроли.
В един от по-ранните си постове обсъдих просто Верига на PWM плавен старт на двигателя който внедри MOC3063 IC за осигуряване на ефективен плавен старт на свързания мотор.
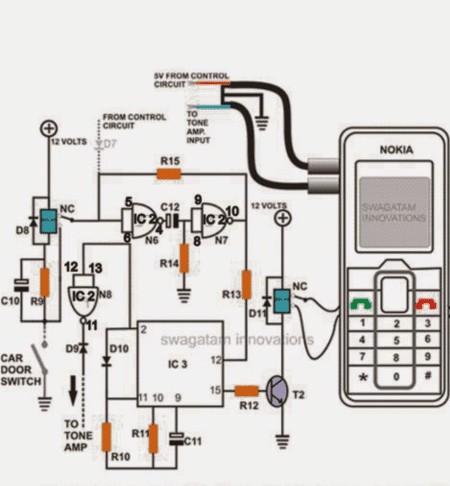
Тук също използваме идентичен метод за налагане на предложената схема на регулатора на скоростта на 3-фазен асинхронен двигател, следното изображение показва как това може да се направи:
На фигурата можем да видим три еднакви MOC оптронови стъпала, конфигурирани в техния стандартен режим на триак регулатор, и входната страна, интегрирана с проста схема на ШИМ IC 555 .
3-те вериги на MOC са конфигурирани за работа с 3-фазния вход за променлив ток и доставят същото към прикрепения асинхронен двигател.
PWM входът на изолираната LED контролна страна на опто определя съотношението на нарязване на 3-фазния AC вход, който се обработва от MOC ICS.
Използване на IC 555 PWM контролер (превключване на нулево напрежение)
Това предполага, чрез коригиране на ШИМ пот, свързан с 555 IC човек може ефективно да контролира скоростта на асинхронния двигател.
Изходът на неговия щифт # 3 идва с променлив работен цикъл, който от своя страна превключва изходните триаци съответно, което води или до увеличаване на AC RMS стойността, или до намаляване на същото.
Увеличаването на RMS чрез по-широки ШИМ позволява да се постигне по-висока скорост на двигателя, докато намаляването на AC RMS чрез по-тесни ШИМ произвежда обратен ефект, тоест кара двигателя да се забави пропорционално.
Горните функции се изпълняват с много прецизност и безопасност, тъй като интегралните схеми са назначени с много вътрешни усъвършенствани функции, специално предназначени за задвижване на симистори и тежки индуктивни товари като асинхронни двигатели, соленоиди, клапани, контактори, твърдотелни релета и др.
IC също така осигурява перфектно изолирана операция за постоянен ток, което позволява на потребителя да извършва настройките без страх от токов удар.
Принципът може също така да се използва ефективно за контролиране на скоростта на еднофазен двигател, като се използва единичен IC на MOC вместо 3.
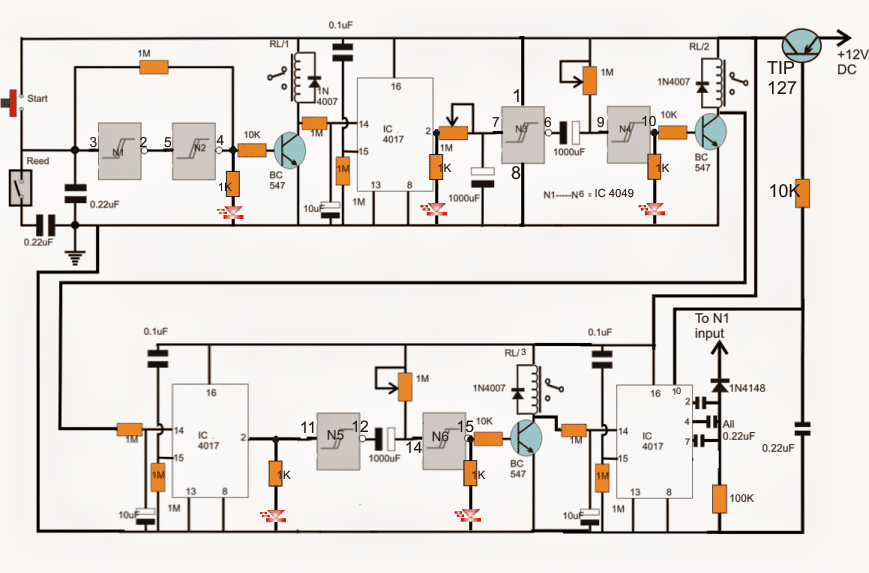
Дизайнът всъщност се основава на пропорционално на времето симисторно задвижване теория. Горната ШИМ верига IC555 може да се регулира, за да се получи 50% работен цикъл при много по-висока честота, докато долната ШИМ верига може да се използва за осъществяване на операцията за контрол на скоростта на асинхронния двигател чрез настройките на свързания съд.
Този 555 IC се препоръчва да има относително по-ниска честота от горната схема IC 555. Това може да се направи чрез увеличаване на кондензатора на пин # 6/2 до около 100nF.

ЗАБЕЛЕЖКА: ДОБАВЯНЕТО НА ПОДХОДЯЩИ ИНДУКТОРИ В СЕРИЯ С ФАЗНИТЕ ЖИЛИ МОЖЕ ДРАСТИЧНО ДА ПОДОБРИ ЕФЕКТИВНОСТТА НА КОНТРОЛ НА СКОРОСТТА НА СИСТЕМАТА.
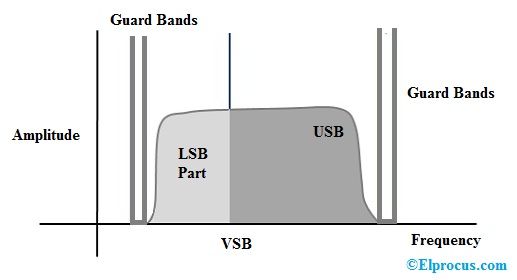
Предполагаема форма на вълната и контрол на фазата, използвайки горната концепция:

Обясненият по-горе метод за управление на 3-фазен асинхронен двигател всъщност е доста суров, тъй като го има без управление V / Hz .
Той просто включва включване / изключване на мрежата с различни скорости, за да произведе средна мощност към двигателя и да контролира скоростта, като променя тази средна променлива мощност към двигателя.
Представете си, ако включите / изключите двигателя ръчно 40 пъти или 50 пъти в минута. Това би довело до забавяне на двигателя ви до някаква относителна средна стойност, но непрекъснато движение. Горният принцип работи по същия начин.
По-техническият подход е да се проектира схема, която осигурява правилен контрол на съотношението V / Hz и автоматично настройва същото в зависимост от скоростта на приплъзване или колебанията на напрежението.
За това ние основно използваме следните етапи:
- H-Bridge или Full Bridge IGBT схема на драйвера
- 3-фазен генератор за захранване на пълната мостова верига
- V / Hz PWM процесор
Използване на пълен мост IGBT контролна верига
Ако процедурите за настройка на горния дизайн, базиран на триак, ви изглеждат обезсърчително, може да се изпробва следното управление на скоростта на асинхронния двигател, основано на PWM:

Схемата, показана на горната фигура, използва един чип пълен мостов драйвер IC IRS2330 (най-новата версия е 6EDL04I06NT), която има всички вградени функции, за да осигури безопасна и перфектна 3-фазна работа на двигателя.
IC се нуждае само от синхронизиран 3-фазен логически вход през своите HIN / LIN пинови за генериране на необходимия 3-фазен осцилиращ изход, който накрая се използва за експлоатация на пълната мостова IGBT мрежа и свързания 3-фазен двигател.
The впръскване на ШИМ за контрол на скоростта се реализира чрез 3 отделни етапа на полумостови NPN / PNP драйвери, контролирани с подаване на SPWM от IC 555 PWM генератор, както се вижда в предишните ни проекти. Това ниво на ШИМ може в крайна сметка да се използва за управление на скоростта на асинхронния двигател.
Преди да научим действителния метод за контрол на скоростта на асинхронния двигател, нека първо разберем как е автоматичен V / Hz контрол може да се постигне с помощта на няколко схеми IC 555, както е обсъдено по-долу
Автоматичната V / Hz PWM верига на процесора (затворена верига)
В горните раздели научихме проектите, които ще помогнат на асинхронния двигател да се движи със скоростта, посочена от производителя, но няма да се регулира според постоянното съотношение V / Hz, освен ако следният PWM процесор не е интегриран с H -Bridge PWM входно подаване.

Горната схема е проста PWM генератор, използващ няколко IC 555 . IC1 генерира ШИМ честота, която се преобразува в триъгълни вълни на пин # 6 на IC2 с помощта на R4 / C3.
Тези триъгълни вълни се сравняват с вълната на синусоида на пин # 5 на IC2. Тези пробни пулсации се получават чрез коригиране на 3-фазната мрежа от променлив ток в 12V променлив ток и се подават към щифт # 5 на IC2 за необходимата обработка.
Чрез сравняване на двете форми на вълната, подходящо оразмерени Генерира се SPWM на пин # 3 на IC2, който се превръща в движеща ШИМ за мрежата на H-моста.
Как работи веригата V / Hz
Когато захранването е включено, кондензаторът на пин # 5 започва с оказване на нулево напрежение на пин # 5, което причинява най-ниската SPWM стойност на H-мостова верига , което от своя страна позволява на асинхронния двигател да стартира с бавен постепенен плавен старт.
Тъй като този кондензатор се зарежда, потенциалът на щифт # 5 се повишава, което пропорционално повишава SPWM и позволява на двигателя да набира скорост постепенно.
Можем да видим и схема за обратна връзка на тахометър, която също е интегрирана с пин # 5 на IC2.
Това оборотомер следи скоростта на ротора или скоростта на приплъзване и генерира допълнително напрежение на щифт # 5 на IC2.
Сега, когато скоростта на двигателя се увеличава, скоростта на приплъзване се опитва да се синхронизира с честотата на статора и в процеса започва да набира скорост.
Това увеличение на индукционното приплъзване увеличава пропорционално напрежението на оборотомера, което от своя страна води до увеличаване на IC2 SPWM изход и това от своя страна допълнително увеличава скоростта на двигателя.
Горната настройка се опитва да поддържа съотношението V / Hz до доста постоянно ниво, докато накрая SPWM от IC2 не е в състояние да увеличи повече.
В този момент скоростта на приплъзване и скоростта на статора придобиват стабилно състояние и това се поддържа, докато входното напрежение или скоростта на приплъзване (поради натоварване) не бъдат променени. В случай, че те бъдат променени, схемата на процесора V / Hz отново влиза в действие и започва да регулира съотношението за поддържане на оптималната реакция на скоростта на асинхронния двигател.
Оборотомерът
The Верига на тахометъра може също така да бъде евтино изграден, като се използва следната проста схема и да се интегрира с описаните по-горе етапи на веригата:

Как да внедрим контрола на скоростта
В горните параграфи разбрахме процеса на автоматично регулиране, който може да се постигне чрез интегриране на a обратна връзка на тахометър към схема за автоматично регулиране на SPWM контролер.
Сега нека научим как скоростта на асинхронен двигател може да се контролира чрез промяна на честотата, което в крайна сметка ще принуди SPWM да падне и да поддържа правилното съотношение V / Hz.
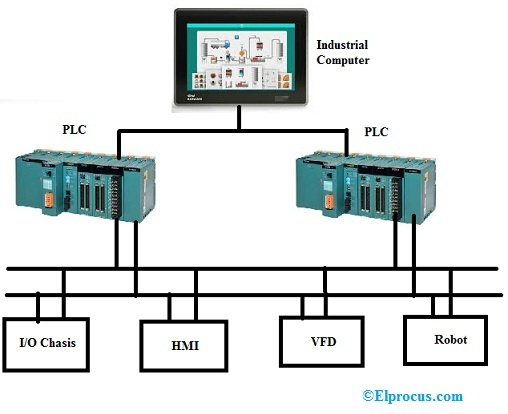
Следващата диаграма обяснява етапа на контрол на скоростта:

Тук можем да видим 3-фазна генераторна верига, използваща IC 4035, чиято честота на фазово изместване може да варира чрез промяна на входа на часовника на неговия щифт # 6.
Трифазните сигнали се прилагат през 4049 IC порта за производство на необходимите HIN, LIN захранвания за пълна мостова мрежа от драйвери.
Това предполага, че чрез подходящо променяне на тактовата честота на IC 4035, ние можем ефективно да променим работната 3-фазна честота на асинхронния двигател.
Това е реализирано чрез проста IC 555 нестабилна верига, която подава регулируема честота на пин # 6 на IC 4035 и позволява честотата да се регулира чрез приложената 100K пота. Кондензаторът С трябва да бъде изчислен така, че регулируемият честотен диапазон да попада в правилната спецификация на свързания асинхронен двигател.
Когато честотното гърне варира, ефективната честота на асинхронния двигател също се променя, което съответно променя скоростта на двигателя.
Например, когато честотата е намалена, причинява намаляване на скоростта на двигателя, което от своя страна води до пропорционално намаляване на напрежението на изхода на оборотомера.
Това пропорционално намаляване на изхода на оборотомера принуждава SPWM да се стеснява и по този начин пропорционално намалява изходното напрежение към двигателя.
Това действие от своя страна гарантира, че съотношението V / Hz се поддържа, като същевременно се контролира скоростта на асинхронния двигател чрез регулиране на честотата.
Внимание: Горната концепция е разработена само на теоретични предположения, моля, продължете с повишено внимание.
Ако имате някакви допълнителни съмнения по отношение на този 3-фазен дизайн на регулатора на скоростта на асинхронния двигател, добре дошли да публикувате същото чрез вашите коментари.
Предишна: Как да проектираме схема за непрекъсваемо захранване (UPS) Напред: Включване / изключване на две алтернативни натоварвания с IC 555