Постът обсъжда еднофазна задвижваща верига с променлива честота или VFD верига за управление на скоростта на променлив ток, без да се засягат техните експлоатационни спецификации.
Какво е VFD
Двигателите и други подобни индуктивни натоварвания конкретно не 'обичат' да работят с честоти, които може да не са в рамките на техните производствени спецификации, и са склонни да станат много неефективни, ако са принудени при такива ненормални условия.
Например двигател, определен за работа с 60Hz, може да не се препоръчва да работи с честоти от 50 Hz или други диапазони.
Това може да доведе до нежелани резултати като загряване на двигателя, по-ниски или по-високи от необходимите скорости и необичайно висока консумация, което прави нещата много неефективни и намалява влошаването на живота на свързаното устройство.
Работата на двигателите при различни условия на входна честота често се превръща в принуда и при такива ситуации VFD или задвижваща верига с променлива честота могат да станат много удобни.
VFD е устройство, което позволява на потребителя да контролира скоростта на двигател с променлив ток чрез регулиране на честотата и напрежението на входното захранване според спецификациите на двигателя.
Това също означава, че VFD ни позволява да управляваме всеки AC двигател чрез всяко налично мрежово захранване, независимо от неговите характеристики на напрежението и честотата, чрез подходящо персонализиране на честотата и напрежението на VFD според спецификациите на двигателя.
Това обикновено се прави с помощта на даденото управление под формата на променлив копче, мащабирано с различно калибриране на честотата.
Изработването на VFD у дома може да звучи като трудно предложение, но погледът към дизайна, предложен по-долу, показва, че все пак не е толкова трудно да се изгради това много полезно устройство (проектирано от мен).
Операция на веригата
Схемата може да бъде разделена по същество на два етапа: Етап на половината от задвижващия блок и етап на PWM логически генератор.
Стъпката на полумостовия драйвер използва полумостовия драйвер IC IR2110, който еднолично се грижи за степента на задвижване на мотора с високо напрежение, включваща съответно две странични и ниски странични MOSFET-та.
По този начин интегралната схема на драйвера формира сърцевината на веригата, но изисква само няколко компонента за изпълнение на тази ключова функция.
Горната интегрална схема обаче ще се нуждае от висока логика и ниска логика в честотите за задвижване на свързания товар при желаната специфична честота.
Тези входни и ниски логически сигнали се превръщат в работни данни за интегралната схема на драйвера и трябва да включват сигнали за определяне на определената честота, както и ШИМ във фаза с мрежовия променлив ток.
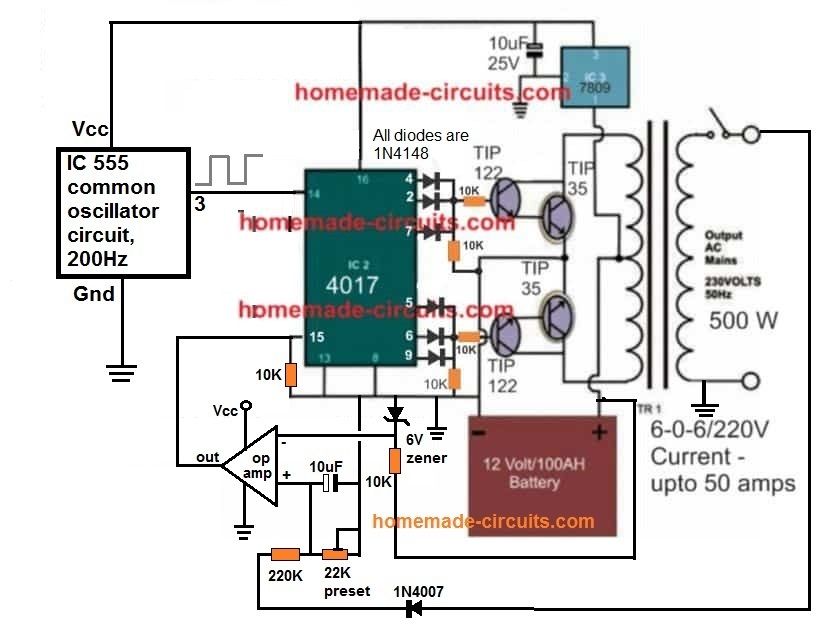
Горната информация е създадена от друг етап, включващ няколко 555 интегрални схеми и десетилетен брояч. IC 4017.
Двете 555 интегрални схеми са отговорни за генерирането на модифицирани ШИМ на синусоидални вълни, съответстващи на пробата от променлив ток с пълна вълна, получена от изходящ мостов изправител.
IC4017 функционира като изходен логически генератор на тотем полюс, чиято честота на променлива честота се превръща в параметър за определяне на ОСНОВНАТА честота на веригата.
Тази определяща честота се изтръгва от щифт № 3 на IC1, който също подава IC2 задействащия щифт и за създаване на модифицираните PWM на пин № 3 на IC2.
Модифицираните синусоидални ШИМ се сканират на изходите на 4017 IC преди подаване на IR2110, за да се насложи точен „отпечатък“ на модифицираните ШИМ на изхода на полумостовия драйвер и в крайна сметка за двигателя, който се експлоатира.
Стойностите на Cx и 180k pot трябва да бъдат подходящо избрани или коригирани, за да се осигури правилно определената честота за двигателя.
Високото напрежение в дренажа на високия страничен MOSFET също трябва да бъде изчислено по подходящ начин и получено чрез коригиране на наличното мрежово напрежение AC след подходящо повишаване или понижаване според спецификациите на двигателя.
Горните настройки ще определят правилните волта на херц (V / Hz) за конкретния двигател.
Захранващото напрежение за двата етапа може да бъде направено в обща линия, еднаква за земната връзка.
TR1 е понижен трансформатор 0-12V / 100mA, който осигурява на веригите необходимите работни захранващи напрежения.
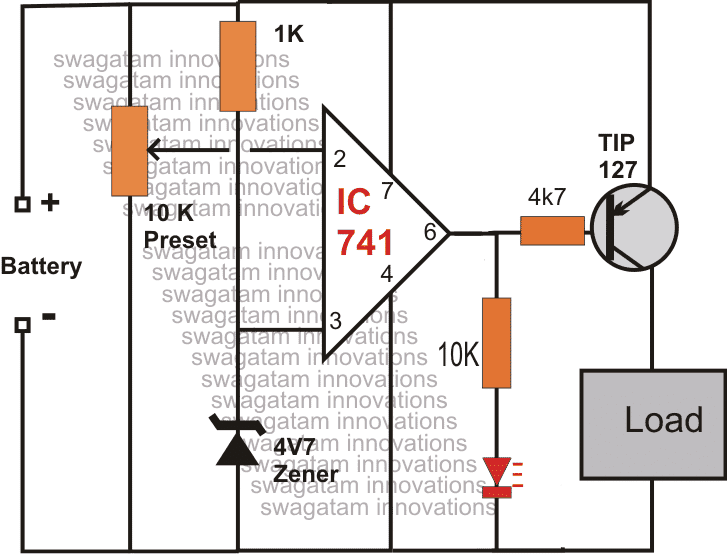
Веригата на PWM контролера

Ще трябва да интегрирате по подходящ начин изходите от IC 4017 от горната диаграма към входовете HIN и LIN на следващата диаграма. Също така свържете посочените диоди 1N4148 в горната схема с долните странични MOSFET порта, както е показано на диаграмата по-долу.
Пълният мостов шофьор

Актуализация:

Обсъденият по-горе прост единичен VFD дизайн може да бъде допълнително опростен и подобрен чрез използване на автоколебателен пълен мост IC IRS2453, както е показано по-долу:
Тук IC 4017 е напълно елиминиран, тъй като пълният мостов драйвер е оборудван със собствен осцилаторен етап и следователно не е необходимо външно задействане за този IC.
Като цялостен дизайн на моста, изходното управление на двигателя има пълен диапазон от нула до максимална настройка на скоростта.
Потът на щифт № 5 на IC 2 може да се използва за управление на скоростта и въртящия момент на двигателя чрез PWM метод.
За контрол на скоростта V / Hz Rt / Ct, свързани с IRS2453 и R1, свързани с IC1, могат да бъдат съответно променени (ръчно) за получаване на подходящи резултати.
Опростяване дори повече

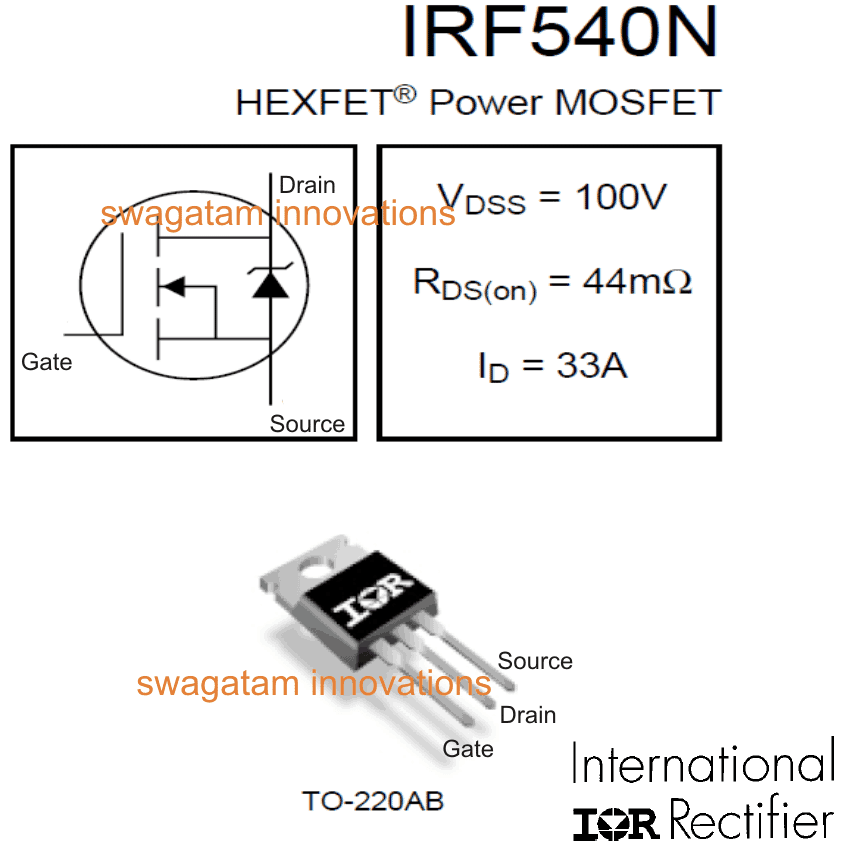
Ако откриете, че цялата секция на моста е поразителна, можете да я замените с P, N-MOSFET базирана верига за пълен мост, както е показано по-долу. Този драйвер с променлива честота използва същата концепция, с изключение на секцията за пълен мост, която използва P-канални MOSFET от горната страна и N-канални MOSFETS от долната страна.
Въпреки че конфигурацията може да изглежда неефективна поради участието на P-канални MOSFET (поради високия им рейтинг на RDSon), използването на много паралелни P-MOSFET може да изглежда като ефективен подход за решаване на проблема с ниския RDSon.
Тук паралелно се използват 3 MOSFET за P-каналните устройства, за да се осигури минимизирано нагряване на устройствата, наравно с N-каналните аналози.
Предишен: Как да защитим MOSFETs - обяснени основи Напред: I / V Tracker Circuit за слънчеви MPPT приложения