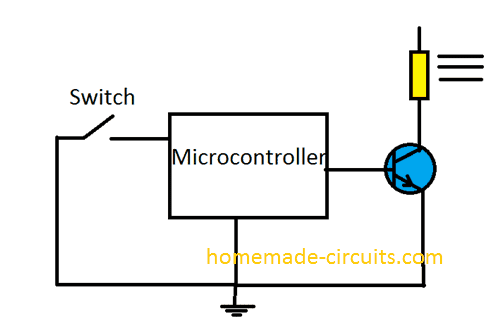
Приложенията с графичен потребителски интерфейс, базирани на операционна система Android, могат не само да се използват за управление на електрически уреди, но и за управление на роботи. Днешните роботи се използват в широк мащаб и по много различни начини за изпълнение на задачи, както се изисква. По-долу са дадени проекти за управление на няколко робота. Не само роботи, но също така е възможно да се използват приложения за Android за много други цели, като например показване на съобщение по електронен път, контролиране на пътната сигнализация. Приложението за Android се състои от панел със сензорен екран, след което докосвайки определена зона, се установява контакт между двата проводящи слоя от двете страни на стъклото и координатите на тази област се изпращат под формата на данни към контролния блок на софтуера. Съответно тези данни се обработват и след това се изпращат до всяко Bluetooth устройство чрез безжична свързаност.
По-долу ще видим някои от проектите, свързани с управлението на електрониката от приложения, базирани на Android.
1. Шпиониращ робот на военно поле с безжична камера за нощно виждане от приложенията за Android
Роботите имат широко приложение в армията, където се използват в много приложения като шпиониране, откриване и унищожаване на цели и др. Роботите, използвани във военните, не са напълно автоматични, тъй като се контролират от човешки същества. Този контрол може да се извърши дистанционно чрез RF или IR или Bluetooth или GSM комуникация. Тук е изграден шпиониращ робот, който е вграден с безжична камера, която се използва за правене на снимки през нощта и предаване на тези изображения на телевизор. Тук цялата работа и движението на робота се контролират от сигналите от базирано на GUI приложение на смартфон с Android.

Блокова диаграма
Едно GUI приложение на Android смартфон с панел със сензорен екран се състои от съответни сензорни бутони, които обозначават необходимите посоки на движение на роботизирания мотор. Например, когато се докосне бутонът, съответстващ на посоката ‘напред’, се развива съответният сигнал, който се предава на Bluetooth устройство. Това Bluetooth устройство е свързано с микроконтролера и тази команда се подава към микроконтролера. Според програмата, микроконтролерът дава подходящ логически сигнал на водача на двигателя, за да управлява двигателите, за да премести робота в желаната посока. По същия начин камерата работи с помощта на IR осветление за нощно виждане.
За подробности щракнете тук: Шпиониращ робот на военно поле с безжична камера за нощно виждане от приложенията за Android
2. Противопожарен робот, управляван дистанционно от Android приложения
Роботите могат да се използват на мястото на конвенционалните пожарни превозни средства (където цялата операция се извършва ръчно) за дистанционно гасене на пожара. Тези роботи могат да бъдат напълно автоматични или да се управляват дистанционно. Тук е разработен такъв робот, който се състои от резервоар за вода и тръба, свързана към резервоара, така че водата се подава от резервоара към тръбата, която се изхвърля от тръбата през дюза според операцията на потребителя. Цялата работа на робота и неговото движение се осъществява чрез контролни сигнали от GUI приложение на смартфона, базиран на Android.

Блокова диаграма
Сензорният панел на приложението GUI осигурява различни сензорни бутони за постигане на управление на робота в различни посоки, а също и за управление на водната помпа и нейния струен спрей в необходимата посока. Когато се докосне необходимия бутон, координатите на този бутон се прехвърлят към софтуера на смартфона и след това се предават на Bluetooth устройството като сигнали. Микроконтролерът, свързан с Bluetooth устройството, получава този сигнал и според програмата дава подходящи сигнали на драйвера на двигателя, за да завърти двигателите в желаната посока.
За подробности щракнете тук: F ire Fighting Robot, управляван дистанционно от Android приложения
3. Изберете и поставете роботизирана ръка и движение, контролирани от Android безжично
Роботът за избор и поставяне е мобилен робот с грайфер за оказване на подходящ натиск върху обект чрез достигане до местоположението му и след това улов. Грайферът, заедно с подвижна стрела, могат да държат обекта и след това да го поставят на желаното място, както желаете. Цялата тази операция се извършва от двигатели, които от своя страна се управляват чрез дистанционно управление. Този проект е разработен като робот за избор и поставяне, при който движението на робота, както и рамото на стрелата му, се контролира от GUI-базирано приложение на смартфон с Android.

Блокова диаграма
Приложението GUI е изградено върху сензорен панел на телефона, който се състои от подходящи бутони за постигане на подходящо движение на робота, както и на крайния му ефект. Използвайки бутоните, подходящите сигнали се предават чрез Bluetooth комуникация към микроконтролера и според програмата микроконтролерът изпраща съответната логика към двигателите за задвижване на двигателите.
Командата за преместване на рамото (крайния ефект) в желаната посока се дава чрез докосване на съответния бутон на смартфона. Тази команда се обработва и използва от микроконтролера за подаване на сигнали към водача на двигателя за завъртане на двигателя на рамото в желаната посока. Когато обект се доближи до грайфера, съгласно командата от приложението, грайферът се отваря и обектът се задържа с необходимото налягане и моторът на грайфера спира автоматично.
За подробности щракнете тук: Изберете и поставете роботизирано рамо и движение, контролирано от Android безжично
4. Роботизиран автомобил с металотърсач, управляван от приложението Android
Роботите се използват в опасни приложения като засичане на наземни мини. Наземните мини са взривни метални устройства, които са поставени под земята и са трудни за откриване. Използването на конвенционалната техника за ръчно откриване на наземни мини с помощта на металотърсачи се оказа опасно и неудобно. Този проект разработва роботизиран автомобил с вградена в него система за детектор на метали, която може да усети присъствието на метали пред него. Цялото управление на робота се извършва от базирано на Android приложение за смартфон.

Блокова диаграма
Базираното на GUI приложение на смартфона се състои от панел със сензорен екран с подходящи бутони за постигане на движението на робота в желаната посока. Управляващите сигнали се предават на Bluetooth устройство, свързано с микроконтролера и според програмата, микроконтролерът дава логически сигнали на драйвера на двигателя, за да завърти двигателите в желаната посока или да спре двигателя. Металотърсач, състоящ се от намотка в резонанс, е вграден във веригата и когато метал се доближи до нея, поради закона на индукцията на Фарадей, резонансът се нарушава, което показва, че металът е открит и съответно тази индикация се показва от светодиод, светещ с звуков зумер.
За подробности щракнете тук: Роботизиран автомобил за металдетектор, управляван от приложението Android
5. Управление на отдалечен робот на Android с приложение
Роботът може да бъде автоматичен, при което неговото движение може да се контролира от сензори, вградени във веригата, които могат да дадат подходящ вход, или може да бъде полуавтоматично с управлението в ръцете на хората. Управлението може да се извърши дистанционно чрез предаване на сигнали към контролния блок чрез RF, GSM или Bluetooth комуникация. Тук в този проект е последвано управлението на робот чрез Bluetooth комуникация. Това се прави с помощта на смартфон, базиран на Android.

Блокова диаграма
Панелът със сензорен екран на приложение, базирано на GUI, се състои от 4 бутона за определяне на движението напред, назад, наляво и надясно на робота заедно със бутона за спиране. Докато се докосне някой от бутоните, координатите, свързани с тази позиция, се прехвърлят към софтуера на ОС и се генерира сигнал. Този сигнал се прехвърля към Bluetooth устройството, след като то получи правилно анализиране и свързване. Bluetooth устройството е свързано с микроконтролера и този сигнал се подава към микроконтролера. Съгласно програмата, микроконтролерът съответно подава подходящи сигнали към драйвера на двигателя, за да осигури желаното въртене на двигателите, така че роботът да се движи в желаната посока.
За подробности щракнете тук: Управление на отдалечен робот с Android приложение
6. Контрол на портата за железопътен прелез от приложението за Android
Този проект осигурява начин за постигане на синхронизация между пристигането и заминаването на влаковете и отварянето и затварянето на преходните врати. Конвенционалната система за ръчно управление на портата за прелеза не е точна и в миналото е довела до много инциденти. По този начин автоматичният начин за управление на отварянето или затварянето на вратите въз основа на управляващия сигнал от машиниста е по-надежден.

Блокова диаграма
Приложението GUI на смартфона, базиран на Android, се използва от машиниста, за да изпрати информация за пристигането на влака, преди да стигне до портата, до микроконтролера чрез Bluetooth устройство. Тъй като микроконтролерът получава този сигнал, той съответно изпраща правилни логически сигнали към водача на двигателя, за да затвори портата за преминаване. Микроконтролерът е програмиран по такъв начин, че изпраща сигналите за фиксиран период от време за затваряне на портата (посочващ времето, за което влакът ще премине коловозите). След този определен период от време се изпращат подходящи логически сигнали до водача на двигателя, за да се отвори автоматично портата за преминаване.
За подробности щракнете тук: Контрол на портата за железопътен прелез от приложението за Android
7. Дистанционно управлявано електронно табло за обяви, базирано на Android
Таблата за обяви се изискват на много места като образователни институции, организации, молове и др. Не е осъществимо и удобно да залепвате ръчно известия на таблото всеки път. Вместо използването на електронен начин за показване на съобщението е по-удобно и спестява време. Този проект дефинира електронно табло, в което съобщението се изпраща от GUI приложението на смартфон безжично и се показва на дисплея.

Блокова диаграма
Базираното на Android приложение е свързано с Bluetooth устройство и се състои от панел със сензорен екран, активиращ вградената клавиатура. Когато съобщението бъде въведено (чрез докосване на съответния бутон на панела на сензорния екран) и изпратеният бутон е натиснат, ASCII кодът, разработен от програмата, се преобразува в серийни данни и след това се предава на Bluetooth устройство. Това Bluetooth устройство е свързано с микроконтролер и след правилна обработка, микроконтролерът (според програмата) показва съобщението на LCD модул, свързан с него.
За подробности щракнете тук: Дистанционно управлявано електронно табло за обяви, базирано на Android
8. Базиран на плътност автоматичен контрол на сигнала за трафик с дистанционно отменяне на трафика на базата на Android
С нарастващото използване на превозни средства в градовете на метрото, задръстванията са основният проблем, с който се сблъскват всеки ден. Тази система определя решение на този проблем чрез разработване на динамичен начин за управление на светофарите въз основа на плътността на трафика. В допълнение към това на превозни средства като линейки, пожарни превозни средства се дава авариен изход от кръстовището въз основа на управляващите сигнали, подадени към контролния блок от приложение, базирано на GUI на смартфон, управляван от Android.

Блокова диаграма
Различни сензори са поставени от всяка страна на кръстовището, за да усетят плътността на трафика от всяка страна. Тъй като плътността на трафика от всички страни е равна или ниска, светофарите са направени да светят в зелено за определен интервал от време. Ако от едната страна гъстотата на трафика е по-голяма, сензорите усещат тази информация и съответно според програмата микроконтролерът изпраща логически сигнали към зеления светодиод от тази страна, така че зелената светлина да свети за по-дълго време . Панел със сензорен екран на приложението, базирано на GUI на смартфона, базиран на Android, се състои от бутони за определяне на всяка посока от кръстовището. Докато аварийно превозно средство се приближава към кръстовището, управляващият сигнал се изпраща чрез докосване на съответния бутон (съответстващ на посоката, в която трябва да се движи аварийното превозно средство). Този сигнал се предава на Bluetooth устройството и тъй като микроконтролерът получава този сигнал за прекъсване (от Bluetooth устройството), той изпраща логически сигнали към светодиодите, така че червените светодиодни сигнали от всички останали страни на кръстовището са включени, с изключение на тази конкретна страна който е включен зелено. Това позволява на аварийното превозно средство да премине, дори ако други превозни средства са пред него.
За подробности щракнете тук: Автоматично управление на сигнала за трафик на базата на плътност с дистанционно замяна на трафика на базата на Android
Ако някой от описаните по-горе проекти ви интересува, можете да видите допълнителни подробности за него, като кликнете върху съответните връзки.
За всички, които искат да приложат тези проекти възможно най-скоро, просто отговорете на този основен въпрос - Можете ли да използвате приложението Android за автоматична работа на робот без човешка намеса?Ако да, кажете ми как в раздела за коментари по-долу.